创建连续时间模型
这个例子显示了如何创建使用连续时间线性模型特遣部队,zpk,党卫军,的朋友命令。
线性时不变模型类型
控制系统工具箱™提供函数用于创建四个基本的线性定常(LTI)模型表示:
传递函数(TF)模型
Zero-pole-gain (ZPK)模型
状态(SS)模型
频率响应数据(朋友)模型
这些函数将模型数据作为输入并创建对象,体现此数据在一个MATLAB®变量。
创建传递函数模型
传输函数(TF)是LTI系统的频域表示。的输出传递函数是一个多项式的系数:
转移函数指定的分子和分母多项式(年代)和B(年代)。在MATLAB中,多项式表示的系数向量,例如,多项式
被指定为(1 2 10)。
创建一个TF对象代表传递函数:
指定分子和分母多项式和使用特遣部队构建TF对象:
num = [1 0];%分子:年代穴= (1 - 2 10);%分母:s ^ 2 + 2 + 10H =特遣部队(num穴)
H = - - - - - - - - - - - - - - - -年代^ 2 + 2 s + 10连续时间传递函数。
此外,您可以指定这个模型作为一个理性的拉普拉斯变量的表达式年代:
s =特遣部队(“年代”);%创建拉普拉斯变量H = s / (s + s ^ 2 + 2 * 10)
H = - - - - - - - - - - - - - - - -年代^ 2 + 2 s + 10连续时间传递函数。
创建Zero-Pole-Gain模型
Zero-pole-gain (ZPK)模型的分解形式传递函数:
这样的模型暴露的根源z分子(0)和根源p分母(波兰)。标量系数k被称为收益。
创建ZPK模型:
指定极点和零点和增益的向量k:
z = 0;% 0p =(2 1 +我我);%波兰人k = 2;%获得H = zpk (z,磷、钾)
H = 2 s - - - - - - - - - - - - - - - - - - - - - - (s) (s ^ 2 - 2 s + 2)连续时间零/钢管/增益模型。
至于TF模型,这个模型还可以指定作为一个理性的表达年代:
s = zpk (“年代”);H = 2 * s / (s - 2) / (s ^ 2 - 2 * s + 2)
H = 2 s - - - - - - - - - - - - - - - - - - - - - - (s) (s ^ 2 - 2 s + 2)连续时间零/钢管/增益模型。
建立状态空间模型
状态(SS)模型是线性时不变系统的时域表示:
在哪里x (t)状态向量,u (t)输入向量,y (t)是输出轨迹。
状态空间模型是源自于描述系统动力学微分方程。例如,考虑一个简单的电动机的二阶歌唱:
在哪里我驱动电流(输入)和吗θ是转子的角位移(输出)。这歌唱状态方程形式可以重写为:
创建这个模型中,指定了状态矩阵A, B, C, D和使用党卫军构建学生对象:
(0 = 1;5 2];B = [0;3);C = 0 [1];D = 0;H = ss (A, B, C, D)
H = = (x1, x2) x1 0 1 x2 u1 x1 5 2 B = 0 x2 3 C = (x1, x2)日元1 0 D = u1 y1 0连续时间状态空间模型。
创建频率响应数据模型
频率响应数据(朋友)模型让你存储测量或模拟复杂系统的频率响应在一个线性时不变对象。然后您可以使用这些数据作为频域的代理模型分析和设计目的。
例如,假设你得到以下数据的频率分析仪:
频率(赫兹):10、30、50、100、500
回应:0.0021 + 0.0009,0.0027 + 0.0029,0.0044 + 0.0052,0.0200 - -0.0040,0.0001 - -0.0021
你可以创建一个朋友对象包含这些数据使用:
频率= [10、30、50、100、500);resp =(0.0021 + 0.0009, 0.0027 + 0.0029, 0.0044 + 0.0052, 0.0200 - -0.0040, 0.0001 - -0.0021我);H =朋友(职责、频率、“单位”,“赫兹”)
H =频率(赫兹)的反应- - - - - - - - - - - - - - - - - - - - - - - 10 2.100 e 03 30 e 03 2.700 + 2.900 + 9.000 e-04i e-03i 50 4.400 e 03 + 5.200 e-03i 100 2.000 e-02 2.100 - 4.000 e-03i 500 1.000 e-04 e-03i连续时间频率响应。
注意,频率值被认为是在rad / s,除非你指定单位赫兹。
创建分布式天线模型
的特遣部队,zpk,党卫军,的朋友命令允许您构建的输出和再分配模型。特遣部队或ZPK模型,通常是由连接简单方便地构建分布式天线模型的输出模型。例如,您可以创建2 x2天线系统传递函数:
使用:
s =特遣部队(“年代”);H = [1 / (s + 1), 0;(s + 1) / (s ^ 2 + s + 3), 4 * s / (s + 2)]
从输入1输出H =…1 1:- - - - - - s + 1 + 1 2: - - - - - - - - - - - - ^ 2 +年代从输入2输出+ 3…1:0 4 s 2: - - - - - - s + 2连续时间传递函数。
分析线性时不变模型
控制系统工具箱提供了一组丰富的功能分析线性时不变模型。这些函数的范围从简单的查询对I / O的大小和复杂的时间和频率响应分析。
例如,您可以获得天线系统传递函数的大小信息H上面指定的输入:
大小(H)
传递函数2 2输出和输入。
你可以计算波兰人使用:
极(H)
ans =4×1复杂-1.0000 + 0.0000我-0.5000 + 1.6583 -0.5000 - 1.6583 -2.0000 + 0.0000
你可以问这个系统是否稳定的使用:
趋于稳定(H)
ans =逻辑1
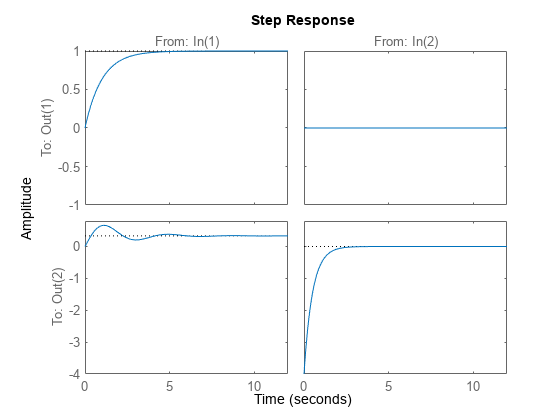
最后,您可以绘制由输入阶跃响应:
步骤(H)