最小方差Distortionless-Response fpga Beamformer (MVDR)
这个例子展示了如何实现一个最小方差distortionless-response (MVDR) beamformer适合硬件。
有关beamformers的更多信息,请参阅传统的和自适应Beamformers。
MVDR客观
的MVDR beamformer保存获得的期望信号的到达方向和变弱干扰从其他方向[1],[2]。
给定的数据从一个传感器阵列,如均匀线性阵列在下图(ULA)”,表单数据矩阵 从数组的样品,
从数组的样品, 是一个
是一个 1列向量数组的数据采样时间
1列向量数组的数据采样时间 ,
, 是矩阵的一行吗。比有更多的样品被元素数组中。这导致的行数更大的比列的数量。估计的协方差矩阵
是矩阵的一行吗。比有更多的样品被元素数组中。这导致的行数更大的比列的数量。估计的协方差矩阵 ,在那里
,在那里 埃尔米特或复共轭转置。
埃尔米特或复共轭转置。

计算MVDR beamformer响应通过解决以下方程 ,在那里
,在那里 是一个转向向量指向期望信号的方向。
是一个转向向量指向期望信号的方向。

MVDR权重向量 计算从和使用下面的方程,规范化保护获得期望信号的到达方向。
计算从和使用下面的方程,规范化保护获得期望信号的到达方向。

MVDR系统响应之间的内积MVDR权向量和一个电流传感器阵列的样本。

HDL-Optimized MVDR
前一节中的三个方程是由三个主要模块实现以下模型。率的变化给矩阵解决额外的时钟周期更新之前下一个输入样本。的时钟周期数之间的一个有效的输入,当复杂的矩阵解决块准备好了两次输入字CORDIC允许时间迭代,+ 15周期为内部延迟。
load_system (“MVDRBeamformerHDLOptimizedModel”);open_system (“MVDRBeamformerHDLOptimizedModel / MVDR - HDL优化”)

而不是形成数据矩阵和计算协方差矩阵的柯列斯基分解上三角矩阵的QR分解直接计算和更新每个数据向量流从传感器阵列。因为数据更新下去,每次分解后遗忘因子应用。集成一个相当于一个矩阵 行,遗忘的因素
行,遗忘的因素 应该设置为
应该设置为

这个例子模拟相当于一个矩阵 行,所以遗忘因子设置为0.9983。
行,所以遗忘因子设置为0.9983。
的复杂Partial-Systolic矩阵解决使用Q-less QR分解和遗忘因子块使用[3]中的方法实现。上三角矩阵 QR分解的柯列斯基分解的是相同的吗除了对角线上的值的迹象。求解矩阵方程
QR分解的柯列斯基分解的是相同的吗除了对角线上的值的迹象。求解矩阵方程 柯列斯基分解的计算不是有效或数字听起来的QR分解计算吗直接[4]。
柯列斯基分解的计算不是有效或数字听起来的QR分解计算吗直接[4]。
运行模型
开放和模拟模型。
open_system (“MVDRBeamformerHDLOptimizedModel”)范围= find_system (“MVDRBeamformerHDLOptimizedModel”,“BlockType”,“范围”);close_system(范围);
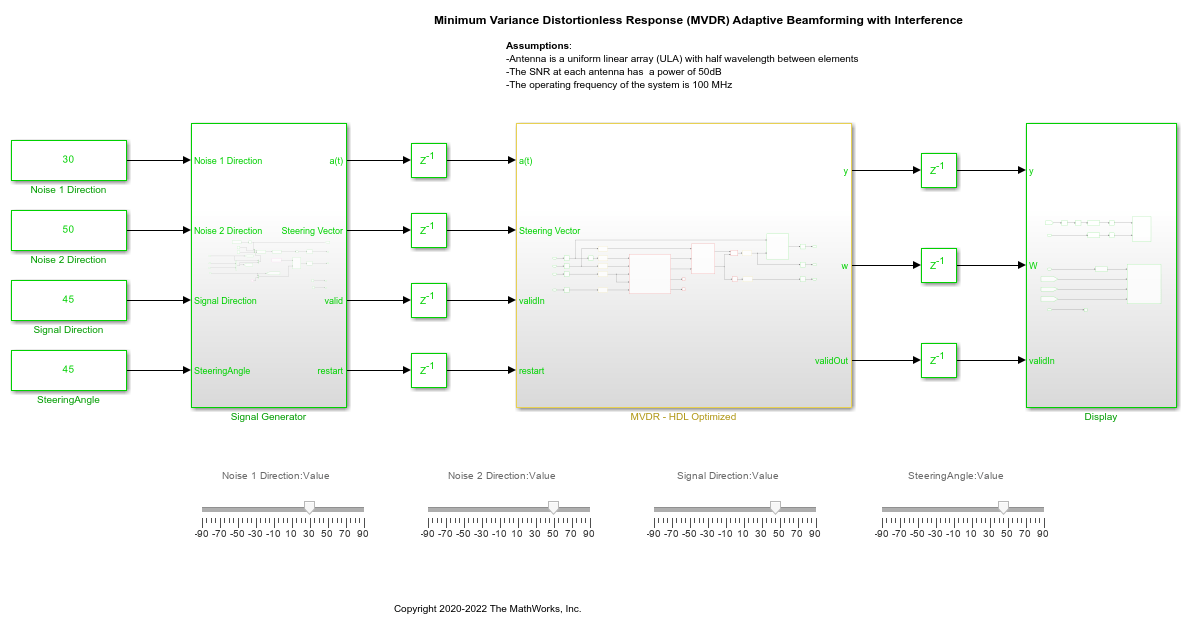
模型模拟,你可以调整信号方向,转向角和噪声方向通过拖动滑块,或者通过编辑常量值。
当信号方向和转向角表示的是一致的蓝色和绿色,你可以看到光束模式0 dB的增益。噪声源nul为红线所示。

所需的脉冲噪声源nul时出现。这个例子模拟延迟相同的硬件,所以你可以看到信号解决随着时间的仿真开始时,方向改变。

设置参数
beamformer设置的参数模型中的工作区。您可以通过编辑修改参数和运行setMVDRExampleModelWorkspace函数。
引用
[1]诉比哈尔等。“自适应参数优化MVDR QR-based beamformer GPS / GLONASS接收机的干扰和多径抑制”。:Proc。16日圣彼得堡国际会议上组合导航系统。圣彼得堡,俄罗斯,2009年5月,页325 - 334。
[2]杰克阉鸡。“高分辨率频率-波数谱分析”。:57卷。1969年,页1408 - 1418。
[3]:雷德。“自适应调零的VLSI收缩期数组”。:IEEE信号处理杂志(1996年7月),29 - 49页。
[4]查尔斯·f·范·贷款。介绍科学计算:利用Matlab矩阵向量的方法。第二版。普伦蒂斯·霍尔出版社,2000年。isbn: 0-13-949157-0。