空间接触力

库:
Simscape /多体/力和力矩
描述
的<年代pan class="simscapeblock">空间接触力块模型几何图形之间的联系与一对固体相关联。您可以使用内置的处罚方法或自定义正常和摩擦力模型的法律联系。
万博1manbetx支持几何图形
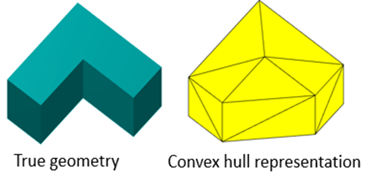
的<年代pan class="simscapeblock">空间接触力块可以接触各种各样的几何形状对模型。几何图形可以来自固体块体内元素子程序库或从曲线和曲面块和子程序库。几何导出一块坚硬的凸包是固体。为非凸体,可以建模通过使用<一个href="//www.tianjin-qmedu.com/au/help/physmod/sm/ref/filesolid.html">文件实,<一个href="//www.tianjin-qmedu.com/au/help/physmod/sm/ref/extrudedsolid.html">挤压固体,或<一个href="//www.tianjin-qmedu.com/au/help/physmod/sm/ref/revolvedsolid.html">旋转固体块,块出口的凸包<年代pan class="simscapeblock">空间接触力块来计算接触力。当计算惯性特性,使用固体块真正的几何学。图显示了一个示例的一个凸几何及其凸包表示。
的<年代pan class="simscapeblock">空间接触力块不接触某些几何模型对。全套的支持对,看到桌子上。万博1manbetx
| 凸包的固体 | 磁盘 | 网格表面 | 无限平面 | 点 | 点云 | |
| 凸包的固体 | 是的 | 是的 | 没有 | 是的 | 是的 | 是的 |
| 磁盘 | 是的 | 没有 | 没有 | 是的 | 没有 | 没有 |
| 网格表面 | 没有 | 没有 | 没有 | 没有 | 是的 | 是的 |
| 无限平面 | 是的 | 是的 | 没有 | 没有 | 是的 | 是的 |
| 点 | 是的 | 没有 | 是的 | 是的 | 没有 | 没有 |
| 点云 | 是的 | 没有 | 是的 | 是的 | 没有 | 没有 |
接触力
图像显示了<年代pan class="simscapeblock">空间接触力块模型空间接触问题。之间的接触是在这种情况下,一个蓝色的基本几何形状和一个红色的追随者几何学。

在接触,每个几何图形有接触框架。两个接触框架总是重合和位于接触点。的<年代pan class="emphasis">z方向的接触框架是一个基本几何图形的外法线向量,但内在的几何法向量的追随者。在连续接触,接触框架在几何接触点的移动而移动。
块适用于接触力的几何图形的起源联系帧按照牛顿第三定律:
法向力,<年代pan class="inlineequation"> ,这是对齐的<年代pan class="emphasis">z设在联系的框架。这个力把几何图形,以减少渗透。
摩擦力,<年代pan class="inlineequation"> ,在于接触平面。这个力反对几何图形之间的相对切向速度。
指定一个正常的接触力,<年代trong class="guilabel">法向力节中,设置<年代trong class="guilabel">方法参数光滑的弹簧阻尼或提供的输入。如果您选择光滑的弹簧阻尼,法向力是:
,
地点:
法向力应用于每个接触几何大小相等,方向相反的方式。
是两个接触几何图形之间的穿透深度。
块中指定的过渡区宽度。
是第一次导数的穿透深度。
是法向力刚度在块中指定。
法向力阻尼块中指定。
是平滑函数。
附近的力法是平滑的渗透。当<年代pan class="inlineequation">d<w,平滑函数不断增加和单调区间[0,w]。这个函数是0时<年代pan class="inlineequation">d= 0时,该函数是1<年代pan class="inlineequation">d=w,函数导数为零d在区间的端点。
更好的检测接触时的价值<年代trong class="guibutton">过渡区宽度参数很小,<年代pan class="simscapeblock">空间接触力块支持可选的万博1manbetx零交点检测。零交点事件只发生在分离距离变化从正面或零负,反之亦然。
请注意
讨论二阶导数过零检测的<年代pan class="simscapeblock">空间接触力块是不同于其他模型的零交点检测万博1manbetx<年代up>®块,如<一个href="//www.tianjin-qmedu.com/au/help/physmod/simulink/slref/fromfile.html">从文件和<一个href="//www.tianjin-qmedu.com/au/help/physmod/simulink/slref/integrator.html">积分器,因为力方程<年代pan class="simscapeblock">空间接触力是连续的。讨论二阶导数过零检测在仿真软件模块的更多信息,见万博1manbetx<一个href="//www.tianjin-qmedu.com/au/help/physmod/simulink/ug/zero-crossing-detection.html" class="a">讨论二阶导数过零检测。
的<年代pan class="simscapeblock">空间接触力块剪辑计算力总是非负。如果力学定律给出了负面力量,阻止应用零力。这种情况简要的几何图形是分离和渗透即将结束。在这一点上,d接近零,d”是负的。这个修改确保接触法向力总是排斥,从来没有吸引力。
指定一个摩擦力,<年代trong class="guilabel">摩擦力节中,设置<年代trong class="guilabel">方法参数光滑的粘滑运动,提供的输入,或没有一个。如果您选择光滑的粘滑运动,摩擦力总是直接与接触点的相对速度的方向和法向力有关的摩擦系数变化取决于相对速度的大小:
,
地点:
是摩擦力。
是正常的力量。
是有效的摩擦系数。
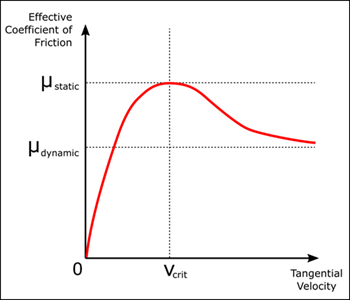
有效的摩擦系数的值是一个函数<年代trong class="guilabel">静态摩擦系数,<年代trong class="guilabel">动态摩擦系数,<年代trong class="guilabel">临界速度参数和相对切向速度的大小。在高相对速度,有效的摩擦系数的值接近的动态摩擦系数。在临界速度,有效的摩擦系数达到最大值=静摩擦系数。图表显示了典型案例的基本关系<年代pan class="inlineequation"> ><年代pan class="inlineequation"> 。在这种情况下,该模型可以近似静摩擦与附近的一个更高的有效摩擦系数小的切向速度。





港口
几何
输入
输出
参数
扩展功能
版本历史
介绍了R2019b
另请参阅
砖固体|<年代pan itemscope itemtype="//www.tianjin-qmedu.com/help/schema/MathWorksDocPage/SeeAlso" itemprop="seealso">圆柱形固体|<年代pan itemscope itemtype="//www.tianjin-qmedu.com/help/schema/MathWorksDocPage/SeeAlso" itemprop="seealso">挤压固体|<年代pan itemscope itemtype="//www.tianjin-qmedu.com/help/schema/MathWorksDocPage/SeeAlso" itemprop="seealso">球形固体|<年代pan itemscope itemtype="//www.tianjin-qmedu.com/help/schema/MathWorksDocPage/SeeAlso" itemprop="seealso">文件实
你也可以从下面的列表中选择一个网站: