MIMO鲁棒性分析
您可以创建和分析由不确定状态空间矩阵组成的不确定状态空间模型。在此示例中,创建具有参数不确定性的MIMO系统,并分析其稳健稳定性和最差的性能。
考虑一个两输入,两输出的两态系统,其模型在状态空间矩阵中具有参数不确定性。首先创建一个不确定的参数p。使用参数,使不确定一个andC矩阵。这b矩阵恰好是不确定的,尽管您将稍后将频域输入不确定添加到模型。
p= ureal('P',10,'百分比',10);a = [0 p; p 0];B =眼(2);c = [1 p;-p 1];h = ss(a,b,c,[0 0; 0 0])
H =不确定的连续时间空间模型,具有2个输出,2个输入,2个状态。模型不确定性由以下块组成:P:不确定的真实,名义= 10,可变性= [-10,10]%,2个出现类型“ H.NominalValue”以查看名义值,get(h)所有属性和与不确定元素相互作用的“ H. ununclytity”。
您可以查看不确定系统的属性H使用得到命令。
获取(h)
名称值:[2x2 ss]不确定性:[1x1 struct] a:[2x2 umat] b:[2x2 double] c:[2x2 umat] d:[2x2 double] e:[2x1 double]cell} internalDelay:[0x1 double] inputDelay:[2x1 double] outputdelay:[2x1 double] ts:0 timeunit:'seconsts'inputName:{2x1 cell} inputunit:{2x1 cell} inputGroup} inputGroup} inputGroup:inputGroup:[1x1 struct] outputname:{2x1 cell:{2x1 cell:{2x11 cell。cell} outputunit:{2x1 cell} outputgroup:[1x1 struct]注意:[0x1 string] userData:[]名称:''samplingGrid:[1x1 struct]
大多数属性的行为方式与相同的属性相同SS对象。属性NominalValue是一个SSobject.
向每个通道添加独立的输入不确定性
模型H不包括执行器动力学。换句话说,执行器模型对于所有频率都是统一的。
Nevertheless, the behavior of the actuator for channel 1 is modestly uncertain (say 10%) at low frequencies, and the high-frequency behavior beyond 20 rad/s is not accurately modeled. Similar statements hold for the actuator in channel 2, with larger modest uncertainty at low frequency (say 20%) but accuracy out to 45 rad/s.
利用Ultidyn对象delta1anddelta2以及塑形过滤器W1andW2将这种形式的频域不确定性添加到模型中。
W1 =压力(.1,20,50);W2 =压力(.2,45,50);delta1 = ultidyn('delta1',[1 1]);delta2 = ultidyn('delta2',[1 1]);g = h*blkdiag(1+w1*delta1,1+w2*delta2)
G =不确定的连续时间空间模型,具有2个输出,2个输入,4个状态。模型不确定性由以下块组成:delta1:不确定的1x1 LTI,峰值增益= 1,1出现delta2:不确定的1x1 LTI,峰值增益= 1,1出现P:不确定的真实,名称= 10,可变性,变异性= [-10,[-10,,10]%,2个出现类型“ G.NoMinalValue”,以查看名义值,“ get(g)”以查看所有属性和“ g.unclantity”,以与不确定元素相互作用。
注意G是一个两输入的两输出不确定系统,依赖三个不确定元素,delta1,,,,delta2, 和p。它有四个州,两个来自H一个来自塑形过滤器的W1andW2,嵌入G。
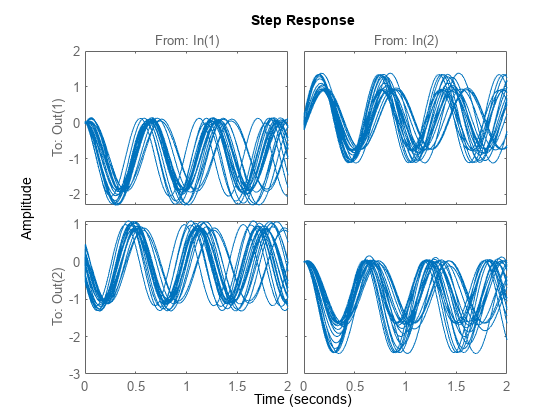
您可以绘制几个样本的2秒步骤响应G固有频率的10%不确定性显而易见。
Stepplot(G,2)
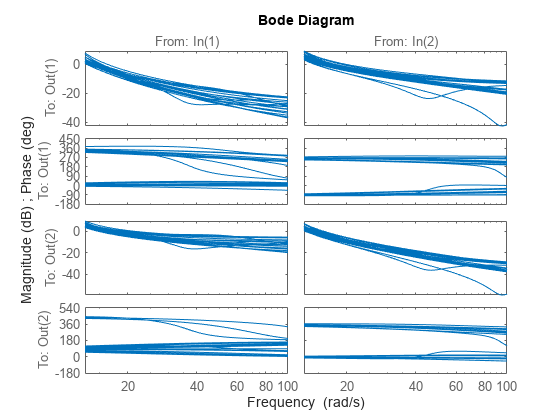
You can create a Bode plot of samples ofG。这high-frequency uncertainty in the model is also apparent. For clarity, start the Bode plot beyond the resonance.
BodePlot(g,{13 100})
关d-Loop Robustness Analysis
加载控制器并验证它是两输入和两输出。
加载('mimokexample.mat')尺寸(k)
具有2个输出,2个输入和9个状态的状态空间模型。
您可以使用命令循环要形成所有标准的植物/控制器反馈配置,包括输入和输出的灵敏度和互补灵敏度。因为G不确定,所有闭环系统也不确定。
f =循环(g,k)
f =带有字段的结构:SI:[2x2 USS] Ti:[2x2 uss] li:[2x2 uss] so:[2x2 uss] to:[2x2 uss] lo:[2x2 uss] psi:[2x2 uss] cso:[2x2 uss] cso:[2x2 uss] poles:[2x2 uss] pol:[13x1 double]稳定:1
F是一个具有许多字段的结构。名义闭环系统的极点F。poles, 和f。稳定如果标称闭环系统稳定,则为1。在其余10个字段中,s代表灵敏度,t或互补的敏感性,以及l为了开环增益。后缀一世ando请参阅工厂的输入和输出。最后,pandC请参阅工厂和控制器。
Hence,ti在数学上与:
LO是G*K, 和Cso在数学上与
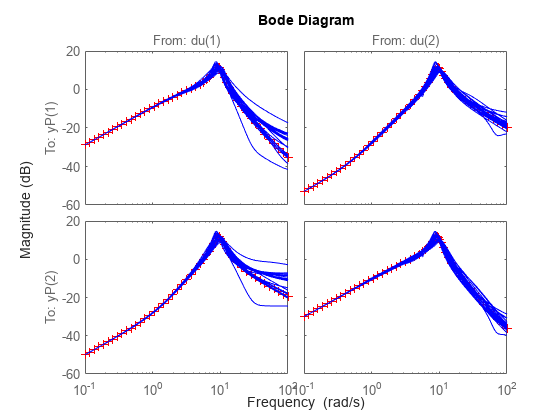
通过绘制的响应,检查植物输入对植物输出的骚乱的传播f.psi。绘制一些样本与名义。
bodemag(f.psi.nominalvalue,'r+',f.psi,'b-',{1E-1 100})
名义稳定性边缘
您可以使用Allmargin调查一次性增益和相位边距,以及盘用于基于磁盘的环路和同时多变量边缘。为标称系统计算边距,并且不反映不确定性模型G。
例如,探索基于磁盘的边距,以在植物输出和输入下进行增益或相位变化。(有关基于磁盘的边距分析的一般信息,请参见使用磁盘边缘的稳定性分析)。
[DMO,MMO] = diskmargin(g*k);[DMI,MMI] = diskmargin(k*g);
在结构阵列中返回循环的时间边距DMOandDMI。这些数组中的每个数组都包含两个反馈通道中的每个阵列。例如,检查第二个反馈通道的工厂输出的边缘。
DMO((2)
ans =带有字段的结构:Gainmargin:[0.0682 14.6726] Phasemargin:[-82.2022 82.2022] diskmargin:1.7444下弯:1.7444上轴:1.7448:1.7448频率:4.8400 worstpertertation:[2x2 ss]
该结果告诉您,第二工厂产量的增益可能会因大约0.07至14.7之间的因素而变化,而第二个环路则不稳定。同样,循环可以在输出时耐受相位的变化,最高约为±82°。
结构MMOandMMI包含两个通道中并发和独立变化的边缘。例如,检查工厂输入的多圆形边缘。
MMI
mmi =带有字段的结构:Gainmargin:[0.1186 8.4289] Phasemargin:[-76.4682 76.4682] diskmargin:1.5758较低:1.5758上空:1.5790:1.5790频率:5.9828
该结果告诉您,工厂输入的增益在两个通道中都可以通过大约1/8至8的因素而变化,而闭环系统不稳定。该系统可以忍受独立和并发的相位变化,约为±76°。由于多圆形边缘考虑了循环相互作用,因此它们往往比循环的时间边距小。
检查植物输出处的多圆形边缘。
MMO
mmo =带有字段的结构:Gainmargin:[0.1201 8.3280] Phasemargin:[-76.3058 76.3058] diskmargin:1.5712下轴:1.5712上空:1.5744频率:17.4276 worstpertertration:[2x2 ss]
植物输出的边缘与输入相似。在Multiloop反馈系统中,此结果并非总是如此。
最后,检查植物输入和输出的同时变化的边缘。
mmio = diskmargin(g,k)
mmio =带有字段的结构:Gainmargin:[0.5676 1.7619] Phasemargin:[-30.8440 30.8440] diskmargin:0.5517下弯:0.55517上空:0.5528频率:9.0688
When you consider all such variations simultaneously, the margins are somewhat smaller than those at the inputs or outputs alone. Nevertheless, these numbers indicate a generally robust closed-loop system. The system can tolerate significant simultaneous gain variations or ±30° degree simultaneous phase variations in all input and output channels of the plant.
稳定的稳定性余量
和盘,您确定名义多旋转系统的各种稳定边缘。这些边距仅针对名义系统计算,并且不反映由尿道andUltidyn对象。当您使用详细的不确定性模型工作时,稳定边距由盘可能无法准确反映系统与不稳定的距离。然后您可以使用罗伯斯塔计算指定不确定性的稳健稳定性余量。
在此示例中,使用罗伯斯塔计算不确定的反馈回路的稳健稳定余量Gandk。您可以使用any of the closed-loop transfer functions inf =循环(g,k)。他们全部,f.si,f.to,,,,etc., have the same internal dynamics, and hence their stability properties are the same.
opt = roboptions('展示',,,,'上');stabmarg = robstab(f.so,opt)
计算峰...百分比完成:100/100系统对于建模的不确定性非常稳定。- 它可以忍受多达221%的建模不确定性。- 不稳定的扰动占建模不确定性的222%。- 这种扰动会在频率13.6 rad/秒处导致不稳定。
Stabmarg =带有字段的结构:下部:2.2129上行:2.2173 Crigict Frequency:13.6331
this analysis confirms what the盘分析建议。就稳定性而言,闭环系统对由不确定参数建模的变体非常健壮delta1,,,,delta2, 和p。我n fact, the system can tolerate more than twice the modeled uncertainty without losing closed-loop stability.
最差的增益分析
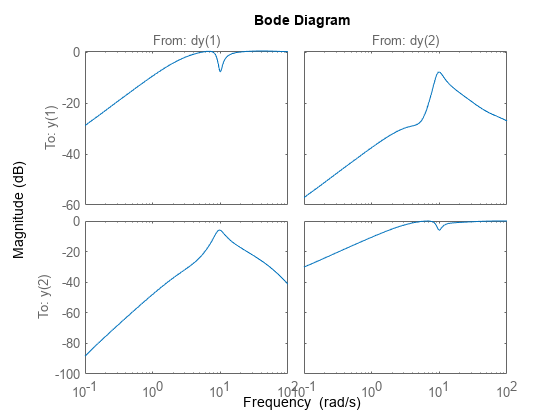
您可以绘制名义输出灵敏度函数的Bode幅度。它清楚地显示出低频以所有通道的不错的干扰拒绝。
bodemag(f.so.nominalvalue,{1e-1 100})
您可以使用规范。
[peaknom,freq] = getpeakgain(f.so.nominalvalue)
峰= 1.1317
FREQ = 7.1300
峰值约为1.13。当不确定元素时,最大输出灵敏度增益是多少delta1,,,,delta2, 和p不同的范围?您可以使用wcgain回答这个。
[Maxgain,wcu] = wcgain(f.so);MAXGAIN
maxgain =带有字段的结构:下部:2.1599上行:2.1643 crigict Frequency:8.3354
分析表明,最差的案例增益在2.1和2.2之间。达到峰值的频率约为8.5。
利用USUBS替换值delta1,,,,delta2, 和p增益为2.1。在输出互补灵敏度中取代,并做出步骤响应。
步骤(f.to.nominalvalue,USUBS(F.TO,WCU),5)
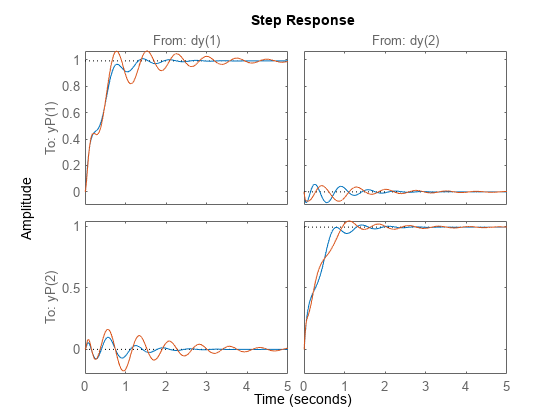
在输出敏感性放大方面,不确定值的最糟糕组合的扰动响应并未显示命令响应的显着降解。结算时间从2个增加到4%,从2增加到4,而非对角线耦合增加了约2倍,但仍然很小。
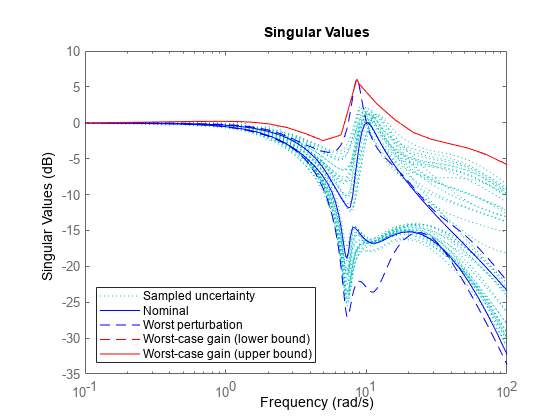
您还可以使用名义和采样系统的最差频率响应wcsigmaplot。
wcsigmaplot(f.to,{1e-1,100})
也可以看看
您还可以从以下列表中选择一个网站:
美洲
- 一个mérica Latina((Español)
- 加拿大(英语)
- 美国(英语)