向前碰撞预警应用程序与FD和TCP / IP
这个例子展示了如何执行一个向前碰撞警告(结合)应用程序通过可以与传感器和视觉数据回放生活FD和TCP / IP协议。记录数据从一个传感器套件安装在测试车辆重播生活就像汽车的网络接口。车辆网络工具箱™和仪器控制工具箱™提供这些接口。此设置用于测试一个结合自动化系统开发使用自动驾驶功能工具箱™。协助设计和开发的实际结合算法,参考的例子向前碰撞警告使用传感器融合(自动驾驶工具箱)。
系统配置
这个示例使用虚拟可以从向量FD渠道。这些虚拟设备通道可用向量驱动程序的安装包的安装www.vector.com。
这个例子中有两个主要组件:
发射机:发送传感器和视觉数据通过可以FD和TCP / IP。这部分代表一个样本车辆环境。它提前录制回放数据就像汽车生活。
接收器:收集的所有数据,并执行结合算法和可视化。这部分代表了应用程序组件。
执行这个例子中,发射机和接收机的部分从单独的MATLAB®会话。这个复制现有的数据源在MATLAB会话作为开发工具。此外,这个示例允许您运行多个执行中的结合应用程序模式(解释和墨西哥人)有不同的性能特征。

生成数据
发送应用程序通过执行helperStartTransmitter函数。它启动一个单独的MATLAB程序运行在当前MATLAB会话。器初始化本身,开始自动发送传感器和视觉数据。发射机运行,使用系统命令。
系统的matlab -nodesktop -nosplash - r helperStartTransmitter &’)
执行前碰撞预警系统(解释模式)
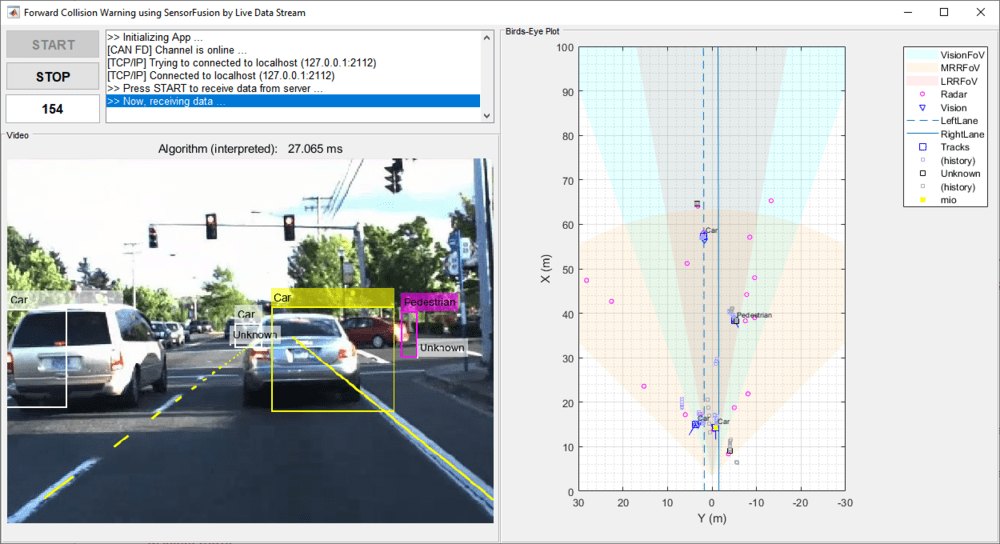
打开接收结合自动化应用程序,执行helperStartReceiver函数。你可以点击开始开始数据接收、处理和可视化。你可以探索helperStartReceiver函数的车辆网络工具箱可以FD功能,仪器控制工具箱TCP / IP功能,和自动驾驶的工具箱功能用于音乐会。
helperStartReceiver(解释)
审查结果
当准备好了,停止使用关闭发射机应用程序窗口按钮命令窗口。点击停止在接收结合自动化应用程序,然后关闭窗口。
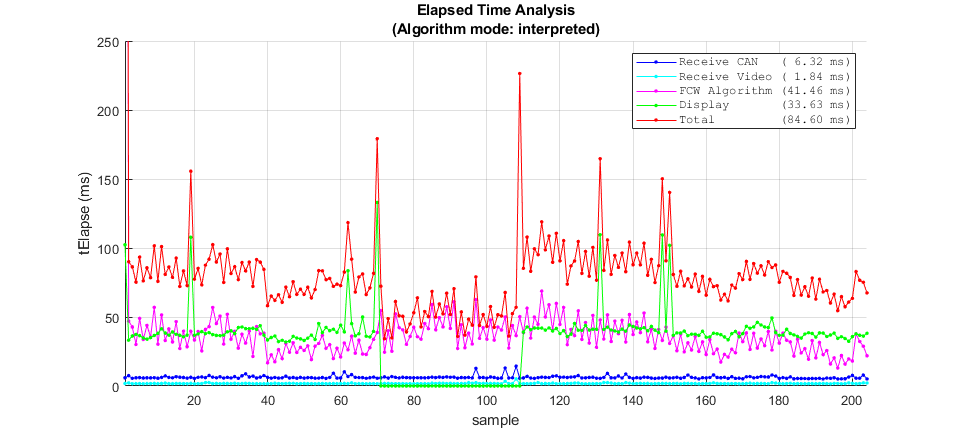
当接收结合自动化应用程序停止,出现一个情节详细描述应用程序的性能特征。它显示时间接收数据、处理结合算法,并进行可视化。基准测试是有用的显示部分设置需要的性能提升。很明显,很大一部分时间执行结合算法。在下一节中,探索代码生成策略来提高性能。
执行前碰撞预警系统(墨西哥人模式)
如果在您的工作流更快的性能要求,您可以使用MATLAB编码器™生成和编译MATLAB代码为墨西哥人代码。要构建这个例子是墨西哥人代码,使用helperGenerateCode函数。构建将编译结合自动化应用程序到一个墨西哥人在MATLAB函数直接调用。
helperGenerateCode(墨西哥人)
重新启动发射机应用程序。
系统的matlab -nodesktop -nosplash - r helperStartTransmitter &’)
接收结合自动化应用程序也可以重新启动。这时间与一个输入参数使用墨西哥人编译代码的前一步。
helperStartReceiver(墨西哥人)
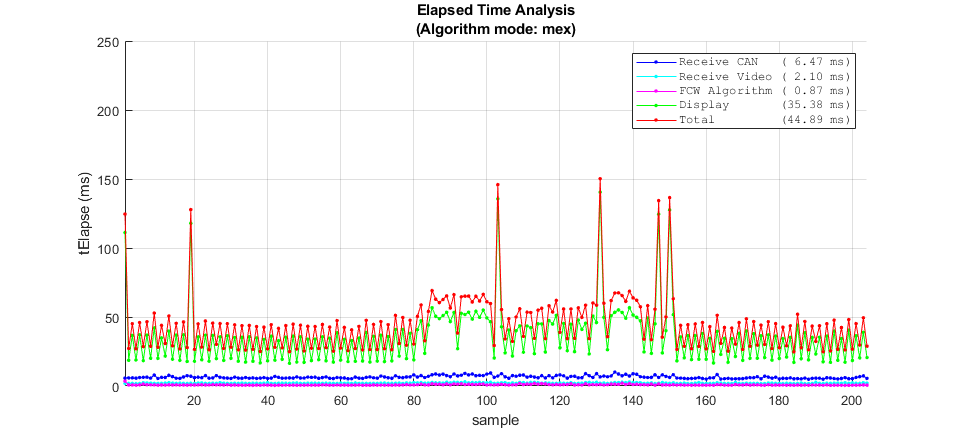
当准备好了,停止并关闭发射机和接收应用程序结合。比较情节为墨西哥人执行的时间解释模式情节,你可以看到结合算法的性能改进。
使用物理硬件和多台计算机
本例使用一台计算机来模拟整个系统与虚拟连接。因此,它的性能是作为一个近似。您还可以执行这个例子使用两台电脑(一个发射机,接收机)。这将是真正的实时数据的场景。为了达到这个目标,你可以简单修改示例代码。
改变可以从虚拟到物理设备需要编辑FD通信发射和接受代码来调用canChannel使用一个硬件设备,而不是虚拟通道。您可能还需要修改调用configBusSpeed根据硬件的功能。这些调用被发现的helperStartReceiver和dataTransmitter函数的例子。
改变TCP / IP通信的多台计算机需要调整发射机的TCP / IP地址从本地主机(127.0.0.1)静态值(192.168.1.2推荐)。这个地址主机传输电脑上设置第一。后,修改tcpipAddr变量helperStartReceiver函数来匹配。
一旦配置和连接身体上,你可以在一台计算机上运行发射机应用和结合自动化应用程序。