建立主机与目标模型之间的通信
这个例子展示了如何在主机端CAN矢量块和目标模型之间建立CAN通信。这个示例使用:
嵌入式编码器™产品与CANcaseXL硬件打开和运行模型。
使用Spectrum Digital F28335 eZdsp™板来运行目标模型。
使用主机模型发送和接收
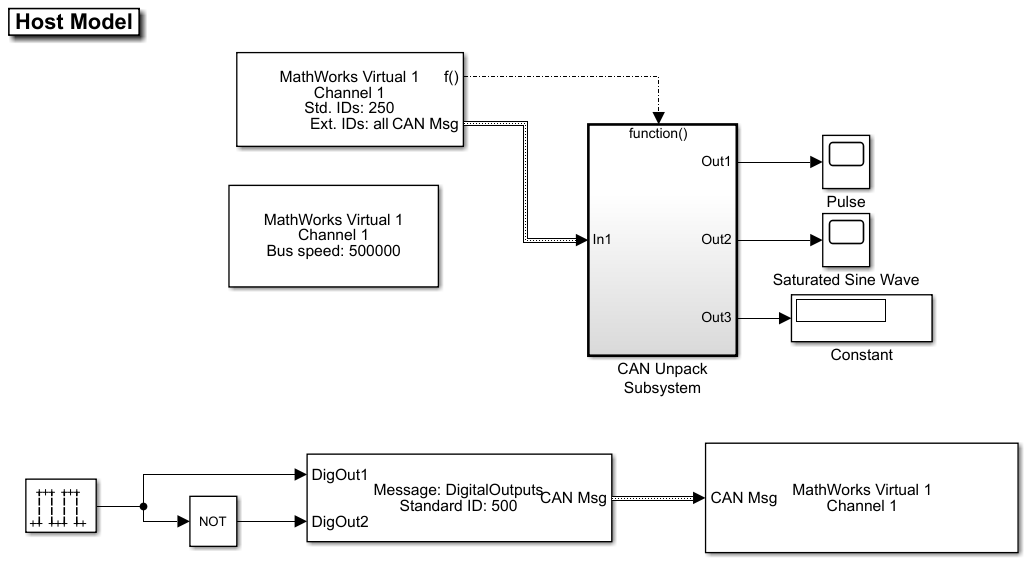
主机模型通过Vector CANcaseXL硬件的Channel 1接收CAN消息。该模型利用矢量硬件的Channel 1在CAN总线上传输CAN消息。
使用目标模型发送和接收
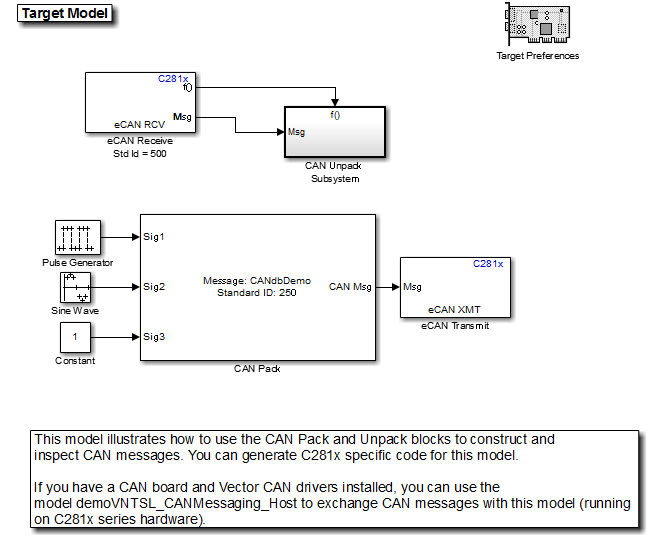
目标模型包含CAN接收和传输模块,使用CAN Pack和Unpack模块从车辆网络工具箱™打包和解包。要成功运行此模型,所做的目标模型配置设置必须与主机模型配置设置匹配。目标模型接收到的消息控制目标DSP板上的GPIO Digital输出。
主机和目标模型之间的通信
运行模型demoVNTSL_CANMessaging_Target.slx在目标硬件上。
打开主机端模型demoVNTSL_CANMessaging_Host.slx.
使用CAN配置块在安装在您的系统上的矢量CAN硬件上配置CAN通道。
在系统上运行主机通信模型。
CAN消息在系统上的主机模型和在目标硬件上运行的目标模型之间发送。主机接收、解包并使用显示块和范围显示它们。主机模型传输的消息控制目标硬件上的GPIO Digital输出。
本例使用Vector CANcaseXL设备。不过,您可以将您的模型连接到其他受支持的硬件。万博1manbetx
你也可以从以下列表中选择一个网站: