Vibration Control in Flexible Beam
This example shows how to tune a controller for reducing vibrations in a flexible beam.
柔性梁的模型
Figure 1 depicts an active vibration control system for a flexible beam.
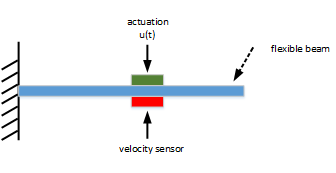
Figure 1: Active control of flexible beam
在此设置中,执行力的执行器 和the velocity sensor are collocated. We can model the transfer function from control inputto the velocity
和the velocity sensor are collocated. We can model the transfer function from control inputto the velocity 使用有限元分析。仅保留前六个模式,我们获得了形式的植物模型
使用有限元分析。仅保留前六个模式,我们获得了形式的植物模型
具有以下参数值。
% 参数xi = 0.05;alpha = [0.09877,-0.309,-0.891,0.5878,0.7071,-0.8091];w = [1,4,9,16,25,36];
The resulting beam model for is given by
is given by
% Beam modelG = tf(alpha(1)^2*[1,0],[1, 2*xi*w(1), w(1)^2]) +。。。tf(alpha(2)^2*[1,0],[1, 2*xi*w(2), w(2)^2]) +。。。tf(alpha(3)^2*[1,0],[1,2*xi*w(3),w(3)^2]) +。。。tf(alpha(4)^2*[1,0],[1, 2*xi*w(4), w(4)^2]) +。。。tf(alpha(5)^2*[1,0],[1, 2*xi*w(5), w(5)^2]) +。。。tf(alpha(6)^2*[1,0],[1, 2*xi*w(6), w(6)^2]); G.InputName ='uG';G.Outputname ='y';
使用此传感器/执行器配置,光束是一个被动系统:
ISAPPANSIVE(G)
ans =逻辑1
通过观察到这一点的奈奎斯特情节证实了这一点 是正的真实。
是正的真实。
nyquist(G)

LQG控制器
LQG控制是主动振动控制的自然公式。LQG控制设置如图2所示。信号 和
和 are the process and measurement noise, respectively.
are the process and measurement noise, respectively.

Figure 2: LQG control structure
First useLQGto compute the optimal LQG controller for the objective

with noise variances:

[a,b,c,d] = ssdata(G); M = [c d;zeros(1,12) 1];% [y;u] = M * [x;u]QWV = blkdiag(b*b',1e-2); QXU = M'*diag([1 1e-3])*M; CLQG = lqg(ss(G),QXU,QWV);
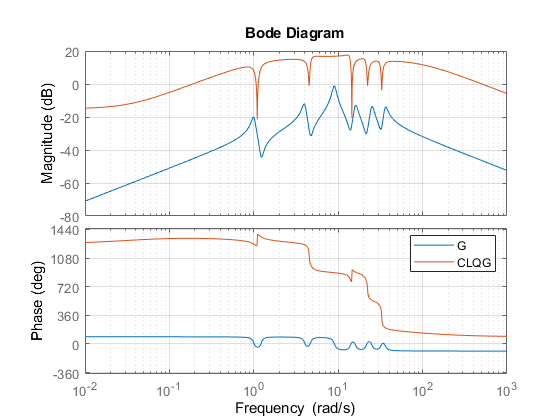
LQG-optimal控制器CLQGis complex with 12 states and several notching zeros.
size(CLQG)
State-space model with 1 outputs, 1 inputs, and 12 states.
bode(G,CLQG,{1e-2,1e3}), grid, legend('G','CLQG')
Use the general-purpose tunersystune尝试简化此控制器。和systune, you are not limited to a full-order controller and can tune controllers of any order. Here for example, let's tune a 2nd-order state-space controller.
c = ltiblock.ss('C'、2、1,1);
Build a closed-loop model of the block diagram in Figure 2.
C.InputName ='yn';C.Outputname ='u';S1 = sumblk('yn = y + n');S2 = sumblk('ug = u + d');CL0 = connect(G,C,S1,S2,{'d','n'},{'y','u'},{'yn','u'});
使用LQG标准 上面是唯一的调整目标。LQG调整目标使您可以直接指定性能权重和噪声协方差。
上面是唯一的调整目标。LQG调整目标使您可以直接指定性能权重和噪声协方差。
R1 = TuningGoal.LQG({'d','n'},{'y','u'},diag([1,1e-2]),diag([1 1e-3]));
现在调整控制器Cto minimize the LQG objective。
[CL1,J1] = Systune(CL0,R1);
Final: Soft = 0.478, Hard = -Inf, Iterations = 40
优化器找到了一个二阶控制器 。与最佳价值
。与最佳价值CLQG:
[〜,jopt] = evalgoal(r1,替换block(cl0,'C',CLQG))
Jopt = 0.4673
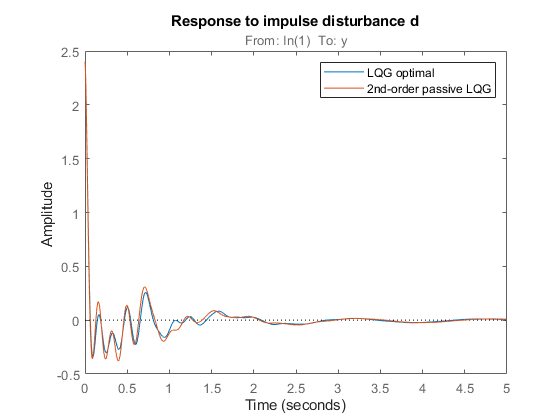
The performance degradation is less than 5%, and we reduced the controller complexity from 12 to 2 states. Further compare the impulse responses fromtofor the two controllers. The two responses are almost identical. You can therefore obtain near-optimal vibration attenuation with a simple second-order controller.
t0 =反馈(g,clqg,+1);t1 = getiotransfer(cl1,'d','y');impulse(T0,T1,5) title('Response to impulse disturbance d') legend('LQG optimal','2nd-order LQG')

被动LQG控制器
我们使用横梁的近似模型来设计这两个控制器。先验,不能保证这些控制器在真实梁上的性能很好。但是,我们知道光束是一个被动物理系统,被动系统的负反馈互连始终是稳定的。因此,如果 is passive, we can be confident that the closed-loop system will be stable.
is passive, we can be confident that the closed-loop system will be stable.
The optimal LQG controller is not passive. In fact, its relative passive index is infinite because 甚至不是最小阶段。
甚至不是最小阶段。
getPassiveIndex(-clqg)
ans = Inf
它的奈奎斯特情节证实了这一点。
nyquist(-CLQG)

Usingsystune,您可以重新调整二阶控制器,并以其他要求应该是被动的。为此,请从yntou(which is )。使用“加权可通过”目标来说明减号。
)。使用“加权可通过”目标来说明减号。
r2 = tuninggoal.WeightedPassitive({'yn'},{'u'},-1,1);r2.openings ='u';
现在重新调整闭环模型CL1to minimize the LQG objectivesubject tobeing passive. Note that the passivity goalR2现在被指定为硬约束。
[CL2,J2,g] = systune(CL1,R1,R2);
Final: Soft = 0.478, Hard = 1, Iterations = 51
The tuner achieves the same如前所述,在执行被动性的同时(硬约束小于1)。验证这一点是被动的。
c2 = getBlockValue(cl2,'C');被动图(-c2)

The improvement over the LQG-optimal controller is most visible in the Nyquist plot.
nyquist(-CLQG,-C2) legend('LQG optimal','2nd-order passive LQG')

最后,比较来自to。
T2 = getIOTransfer(CL2,'d','y');impulse(T0,T2,5) title('Response to impulse disturbance d') legend('LQG optimal','2nd-order passive LQG')
Usingsystune,您设计了一个二阶被动控制器,具有近乎最佳的LQG性能。
See Also
systune|tuninggoal.WeightedPassitive|tuninggoal.lqg
相关话题
您还可以从以下列表中选择一个网站:
Americas
- AméricaLatina(Español)
- Canada(English)
- United States(English)
欧洲
- Belgium(English)
- 丹麦(English)
- Deutschland(德意志)
- España(Español)
- Finland(English)
- 法国(Français)
- 爱尔兰(English)
- 意大利(Italiano)
- Luxembourg(English)
- Netherlands(English)
- 挪威(English)
- Österreich(德意志)
- Portugal(English)
- Sweden(English)
- 瑞士
- 英国(English)