波达方向估计和Beamscan MVDR,和音乐
这个例子演示了使用beamscan MVDR,音乐到达方向(DOA)估计。Beamscan技术,形成一个传统的梁,扫描方向获得感兴趣的空间频谱。最小方差无失真响应(MVDR)类似于beamscan但使用一个MVDR波束。多重信号分类(音乐)是子空间方法,提供高分辨率DOA估计。所有三种方法,输出的峰值的空间频谱显示接收到的信号的到达角。在这个例子中,我们演示使用beamscan MVDR和音乐来估算侧向角均匀线性阵列(ULA)”和方位角和高度角均匀矩形数组(URA所言)。
建模齿龈的接收信号
首先,模型包含10个各向同性的均匀线性阵列(ULA)”天线间距为0.5米。
齿龈= phased.ULA (“NumElements”10“ElementSpacing”,0.5);
假设两个窄带信号影响的数组。第一个信号到达40°的方位和0°高程,而第二个信号到达-20°的方位和在海拔0°。系统的工作频率300 MHz。
ang1 = [40;0);%的第一个信号ang2 = [-20;0);%的第二信号ang = [ang1 ang2];c = physconst (“光速”);fc = 300 e6;%工作频率λ= c / fc;pos = getElementPosition (ula)”/λ;Nsamp = 1000;
同时,假设在每个天线热噪声功率是0.01瓦。
nPower = 0.01;
生成多路信号接收的齿龈。
rs = rng (2007);信号= sensorsig (pos, Nsamp ang,英国能源再生公司);
齿龈Beamscan DOA估计
我们想使用接收信号估计两个新风。因为收到的信号是齿龈,围绕它的轴是对称的,我们不能同时获得方位和仰角。相反,我们可以估算侧向角,测量的侧向齿龈。这些角之间的关系如下图所示:

相对应的侧向角度两个事件的方向是:
broadsideAngle = az2broadside (ang(: 1)和(2:))
broadsideAngle = 40.0000 - -20.0000
我们可以看到两个侧向角是一样的方位角度。一般来说,当仰角是零和方位角(-90 90)内,侧向角是一样的方位角。在下面我们只执行转换时是不平等的。
beamscan算法扫描传统梁通过预定义扫描区域。在这里我们设置扫描区域覆盖所有180度(-90 90)。
spatialspectrum = phased.BeamscanEstimator (“SensorArray”、齿龈…“OperatingFrequency”足球俱乐部,“ScanAngles”,90:90);
默认情况下,beamscan估计只产生一个空间频谱扫描地区。设置DOAOutputPort属性为true来获取DOA估计。设置NumSignals属性2找到两座山峰顶部的位置。
spatialspectrum。DOAOutputPort = true;spatialspectrum。NumSignals = 2;
我们现在获得空间频谱和新风。估计DOAs显示正确的值,这是40°、-20°。
[~ (ang) = spatialspectrum(信号)
ang = 40 -20
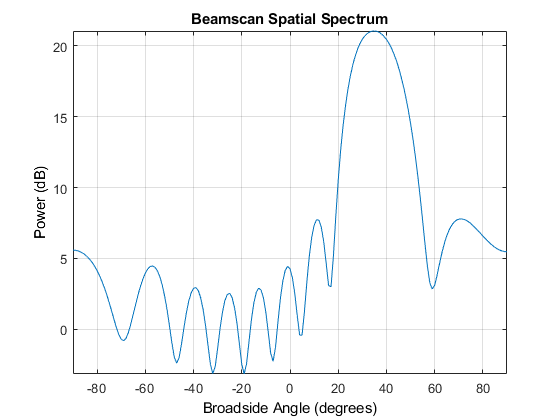
情节的空间频谱beamscan输出。
plotSpectrum (spatialspectrum);

提高分辨率估计使用MVDR和音乐
传统的梁不能解决两个间隔太近的信号。当两个信号到达方向隔开少于波束宽度,beamscan将无法估计信号的方向。为了说明这个限制,我们从30°模拟两个接收信号和40°的方位。
ang1 = [30;0);ang2 = [40;0);信号= sensorsig (pos, Nsamp ang1 ang2),英国能源再生公司);[~ (ang) = spatialspectrum(信号)
ang = 35 71
结果不同于真正的方位角度。让我们看一下输出频谱。
plotSpectrum (spatialspectrum);
输出空间谱只有一个占主导地位的高峰。因此,它不能解决这两个间隔太近的信号。当我们试图估计DOA的山峰beamscan输出,我们得到了错误的估计。beamscan对象返回两个最大峰值的估计DOAs无论多么不同的山峰。在这种情况下,beamscan返回小峰在71°第二估计。
解决信号的间隔太近,我们可以使用最小方差无失真响应(MVDR)算法或多重信号分类算法(音乐)。首先,我们将检查MVDR估计量,扫描一个MVDR波束在指定的区域。因为一束MVDR波束宽度较小,它有更高的分辨率。
mvdrspatialspect = phased.MVDREstimator (“SensorArray”、齿龈…“OperatingFrequency”足球俱乐部,“ScanAngles”90:90,…“DOAOutputPort”,真的,“NumSignals”2);[~ (ang) = mvdrspatialspect(信号)plotSpectrum (mvdrspatialspect);
ang = 30 40

MVDR算法正确估计DOAs beamscan不肯舍弃的。改进的决议是要付出代价的。MVDR更敏感的传感器位置错误。在传感器位置不准确的情况下,MVDR可以产生更大的空间比beamscan频谱。此外,如果我们进一步减少两个信号的水平方向的差异小于MVDR波束的波束宽度,MVDR估计也将失败。
音乐的算法也可以用于解决这些间隔太近的信号。估计到达的两个来源的方向和比较的空间频谱MVDR的空间频谱音乐。
musicspatialspect = phased.MUSICEstimator (“SensorArray”、齿龈…“OperatingFrequency”足球俱乐部,“ScanAngles”90:90,…“DOAOutputPort”,真的,“NumSignalsSource”,“属性”,“NumSignals”2);[~ (ang) = musicspatialspect(信号)ymvdr = mvdrspatialspect(信号);ymusic = musicspatialspect(信号);helperPlotDOASpectra (mvdrspatialspect.ScanAngles…musicspatialspect.ScanAngles、ymvdr ymusic,“乌拉”)
ang = 30 40

到达使用音乐的方向是正确的,和音乐比MVDR提供更好的空间分辨率。音乐、喜欢MVDR敏感传感器位置错误。此外,资源的数量必须准确已知或估计。当指定来源的数量是不正确的,MVDR Beamscan可能仅仅返回微不足道的山峰从正确的空间频谱。相反,音乐空间谱本身可能是不准确的如果不指定来源的数量正确。此外,音乐的振幅谱的峰值不能解释为的力量来源。
齿龈,额外的高分辨率算法可以进一步利用的特殊几何齿龈。看到高分辨率的波达方向估计。
转换侧向角方位
虽然我们只能估计使用齿龈较宽的角度,我们可以把估计侧向角方位角度如果我们知道他们的传入的海拔。我们现在模型两个信号来自35°高程和估计相应的侧向角度。
ang1 = [40;35);ang2 = [15;35);信号= sensorsig (pos, Nsamp ang1 ang2),英国能源再生公司);[~ (ang) = mvdrspatialspect(信号)
ang = 32 12
由此产生的侧向角度从方位或高程的角度是不同的。我们可以把侧向角方位角度如果我们知道海拔。
ang = broadside2az (ang, 35)
ang = 40.3092 - 14.7033
Beamscan URA所言的DOA估计
接下来,我们说明了DOA估计使用10-by-5均匀矩形数组(URA所言)。URA所言可以估计方位和仰角的角度。每一行之间的元素间距0.3米,0.5米每列之间。
ura所言= phased.URA (“大小”10 [5],“ElementSpacing”[0.3 - 0.5]);
假设两个信号影响的。第一个信号到达40°的方位角和仰角45°,而第二个信号到达-20°的方位和在海拔20°。
ang1 = [40;45];%的第一个信号ang2 = [-20;20);%的第二信号信号= sensorsig (getElementPosition (ura所言)/λ,Nsamp,…[ang1 ang2),英国能源再生公司);rng (rs);%恢复随机数发生器
创建一个二维beamscan估计对象的。这个对象使用相同的算法作为一维情况下,除了它在方位角和仰角扫描而不是侧向角度。
扫描指定的区域属性“AzimuthScanAngles”和“ElevationScanAngles”。为了减少计算复杂度,我们假设一些关于输入信号的先验知识的方向。我们限制方位角扫描区域45[-45]和仰角扫描区域60 [10]。
azelspectrum = phased.BeamscanEstimator2D (“SensorArray”ura所言,…“OperatingFrequency”足球俱乐部,…“AzimuthScanAngles”45:45,“ElevationScanAngles”10:60,…“DOAOutputPort”,真的,“NumSignals”2);
DOA的输出是一个2乘N矩阵N是信号方向的数量。第一行包含方位角度而第二行包含高程角度。
[~ (ang) = azelspectrum(信号)
ang = 40 -20 45 20
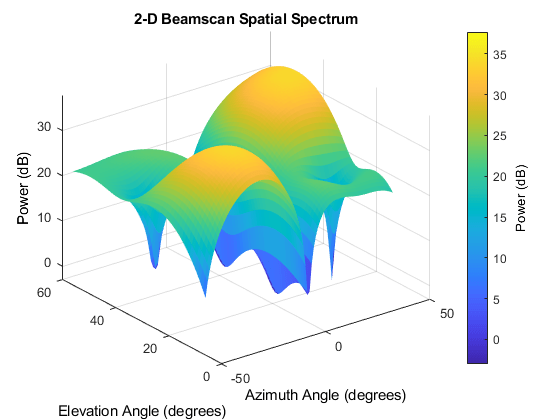
图3 d光谱在方位角和仰角。
plotSpectrum (azelspectrum);
MVDR URA所言的DOA估计
类似于齿龈的例子中,我们使用一个2 d版本的MVDR算法。因为我们的传感器位置的知识是完美的,我们预计MVDR谱比beamscan有更好的分辨率。
mvdrazelspectrum = phased.MVDREstimator2D (“SensorArray”ura所言,…“OperatingFrequency”足球俱乐部,…“AzimuthScanAngles”45:45,“ElevationScanAngles”10:60,…“DOAOutputPort”,真的,“NumSignals”2);[~ (ang) = mvdrazelspectrum(信号)plotSpectrum (mvdrazelspectrum);
20和40 = -20 45

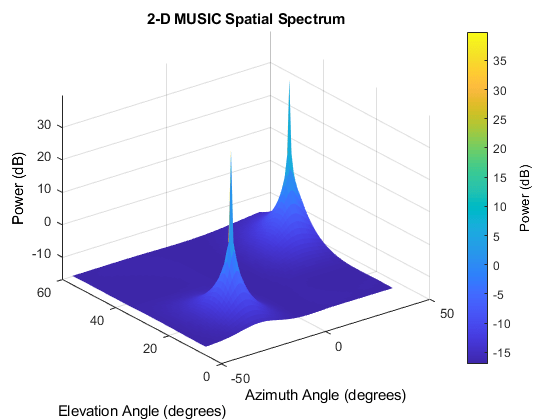
音乐URA所言的DOA估计
我们还可以使用音乐的到达方向估计算法两个方面。
musicazelspectrum = phased.MUSICEstimator2D (“SensorArray”ura所言,…“OperatingFrequency”足球俱乐部,…“AzimuthScanAngles”45:45,“ElevationScanAngles”10:60,…“DOAOutputPort”,真的,“NumSignalsSource”,“属性”,“NumSignals”2);[~ (ang) = musicazelspectrum(信号)plotSpectrum (musicazelspectrum);
20和40 = -20 45
估计比较MVDR和音乐,让我们一起考虑来源位置更近。使用MVDR和音乐,计算两个来源的空间频谱位于10°方位和高程3°隔开。
ang1 = [10;20);%的第一个信号ang2 = [10;23);%的第二信号信号= sensorsig (getElementPosition (ura所言)/λ,Nsamp,…[ang1 ang2),英国能源再生公司);[~,angmvdr] = mvdrazelspectrum(信号)[~,angmusic] = musicazelspectrum(信号)
angmvdr = 10 -27 22 21 angmusic = 10 10 23 20
在这种情况下,只有音乐正确估计方向到达的两个来源。为什么,情节海拔的每个空间频谱10°方位。
ymvdr = mvdrazelspectrum(信号);ymusic = musicazelspectrum(信号);helperPlotDOASpectra (mvdrazelspectrum.ElevationScanAngles…musicazelspectrum.ElevationScanAngles ymvdr (: 56), ymusic(:, 56岁),URA所言的)
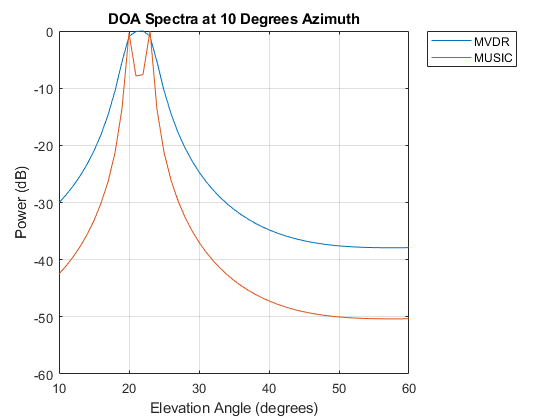
自从音乐频谱比MVDR更好的空间分辨率,音乐正确识别来源而MVDR未能这样做。
总结
在这个例子中,我们展示了如何应用beamscan, MVDR和音乐技术DOA估计问题。我们使用这两种技术来估计侧向角齿龈收到的信号。MVDR算法有更好的分辨率比beamscan当没有传感器位置误差。比MVDR音乐有更好的分辨率,但来源必须是已知的数量。我们还演示了如何在方位和侧向角之间进行转换。接下来,我们应用beamscan MVDR和音乐来估计方位角和高度角使用URA所言。在所有这些情况下,我们策划的输出空间频谱,并再次发现,音乐最好的空间分辨率。Beamscan、MVDR和音乐技术,可以应用于任何类型的数组,但是对于这种和ura所言有额外的高分辨率技术,可以进一步利用阵列几何。