鲁棒稳定性、健壮的性能和μ分析
这个例子展示了如何使用鲁棒控制工具箱™来分析和量化反馈控制系统的鲁棒性。它还提供了与μ分析和深入的联系mussv函数。
系统描述
图1显示了一个闭环系统的框图。工厂模式 是不确定的和植物输出 必须规范保持小扰动的存在 和测量噪声 。

图1:闭环系统的鲁棒性分析
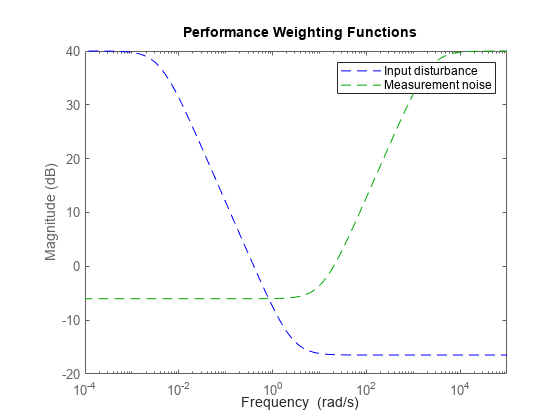
抑制干扰和噪声不敏感性能量化的目标
在哪里 和 是加权函数反映频率的内容吗 和 。在这里 在低频率和大吗 大在高频率。
Wd =补足重量的东西(。4,100 .15点);Wn =补足重量的东西(0.5,20100);bodemag (Wd,“b——”Wn,“g——”)标题(“性能权重函数”)传说(输入扰动的,测量噪声的)
创建一个不确定的工厂模型
不确定工厂模式P是一个稍有阻尼二阶系统参数不确定性在分母系数和显著的频率相关未建模动态超出6 rad / s。数学模型的样子:
的参数k被认为是大约40%不确定,名义价值16。核电站的频率相关不确定性输入被认为是在低频率30%左右,上升到100%在10 rad / s,和更大的超越。构建不确定工厂模型P通过创建,结合不确定的元素:
k =尿素的(“k”,16岁,“比例”,30);δ= ultidyn (“δ”[1],“SampleStateDim”4);吴=补足重量的东西(0.3、10、20);P =特遣部队(16 (1 0.16 k)) *(1 +吴*δ);
设计一个控制器
我们在示例中使用的控制器设计”提高稳定性,同时保留开环特性”。使用的植物模型的名义价值是不确定的植物上面创建模型。出于完整性的考虑,我们重复的命令用于生成控制器。
K_PI = pid (0.8);K_rolloff =特遣部队(1)[1]1/20);Kprop = K_PI * K_rolloff;[negK, ~,伽马]= ncfsyn (P.NominalValue -Kprop);K = -negK;
关闭循环
使用连接建立一个不确定的模型图1的闭环系统。名字每个块的信号进出,让连接做连接:
P。u=“了”;P。y=“yP”;K。u=“英国”;K。y=“即”;S1 = sumblk (‘= yK + D’);S2 = sumblk (“英国= yp - N”);Wn。u =“n”;Wn。y =“N”;Wd。u =' d ';Wd。y =' D ';闭环=连接(磷、钾,S1, S2, Wn, Wd, {' d ',“n”},“yP”);
的变量闭环是一个不确定的系统有两个输入和一个输出。这取决于两个不确定的元素:一个真正的参数k和一个不确定的线性、定常动态元素δ。
闭环
不确定的连续时间1输出状态空间模型,2输入,11个州。模型不确定性由以下模块组成:三角洲:不确定1 x1 LTI,峰值增益= 1,1出现k:不确定真实,名义= 16,可变性=[-30,30]% 1事件类型”闭环。NominalValue”的名义价值和“闭环。不确定性”与不确定的交互元素。
鲁棒稳定性分析
经典的利润率从allmargin显示良好的稳定鲁棒性非结构化增益/阶段循环内的变化。
allmargin (P.NominalValue * K)
ans =结构体字段:GainMargin: [6.2984 - 10.9082] GMFrequency: [1.6108 - 15.0285] PhaseMargin: [79.9812 -99.6214 63.7590] PMFrequency: [0.4467 3.1469 5.2304] DelayMargin: [3.1253 1.4441 0.2128] DMFrequency:[0.4467 3.1469 5.2304]稳定:1
所有值的闭环系统保持稳定的k,δ在上面指定的范围?回答这个问题需要更复杂的分析使用robstab函数。
[stabmarg, wcu] = robstab(闭环);stabmarg
stabmarg =结构体字段:下界:1.4668 UpperBound: 1.4697 CriticalFrequency: 5.8933
的变量stabmarg使的上下界鲁棒稳定性裕度衡量在多大的不确定性k,δ前反馈回路可以容忍变得不稳定。例如,边缘0.8表明,只有80%的指定的不确定性水平可能导致不稳定。这里的利润大约是1.5,这意味着闭环将保持稳定多达150%的指定的不确定性。
的变量wcu包含的组合k和δ接近他们的名义值导致不稳定。
wcu
wcu =结构体字段:δ(1 x1 ss):凯西:23.0548
我们可以把这些值代入闭环,并验证这些值导致闭环系统不稳定。
格式短e极(usubs(闭环,wcu))
ans =15×1复杂-1.2591 e + 03 + 0.0000 -2.0937 e + e + 00我02年+ 0.0000 e + 00我-2.4785 e + 1 + 0.0000 e + 00我-8.2633 e + 00 + 1.1488 e + 01我-8.2633 e + 00 - 1.1488 e + e i -1.9994 + 1 + 0.0000 e + 00我4.9638 e-13 + 5.8933 e + e-13 4.9638 - 5.8933 e + 00 00我-3.2901 e + 00 + 0.0000 e + 00我-1.5907 e + 00 + 2.3468 e + 00我⋮
注意,不稳定的闭环极点的固有频率是由stabmarg.CriticalFrequency:
stabmarg.CriticalFrequency
ans = 5.8933 e + 00
与μ分析
结构奇异值,或
所使用的数学工具robstab计算鲁棒稳定性。如果你熟悉结构奇异值分析,您可以使用mussv函数直接计算亩作为频率的函数和繁殖上面的结果。这个函数mussv鲁棒性分析所有命令的底层引擎。
使用mussv,我们首先提取(δM)不确定的闭环模型的分解闭环,在那里δ是一个block-diagonal矩阵(规范化)不确定的元素。第三的输出参数lftdata,BlkStruct,描述了block-diagonal结构δ,可以直接使用mussv
[M,δ,BlkStruct] = lftdata(闭环);
对于鲁棒稳定性分析,只有渠道米与不确定性相关的渠道。基于行/列的大小δ,选择适当的列和行米。记住的行δ对应的列米,反之亦然。因此,列维度δ用于指定的行吗米:
szDelta =大小(δ);M11公路= M (1: szDelta (2), 1: szDelta (1));
在其最简单的形式,执行mu-analysis有限网格的频率。选择一个对数间隔频率点的向量和评估的频率响应M11公路在这个频率电网。
50ω= logspace (1、2);M11_g =朋友(M11公路ω);
计算μ(M11公路)在这些频率和情节产生的上下界限:
mubnds = mussv (M11_g BlkStruct,“年代”);LinMagopt = bodeoptions;LinMagopt。PhaseVisible =“关闭”;LinMagopt。XLim = (1 e 1 1 e2);LinMagopt。MagUnits =“abs”;bodeplot (mubnds (1, 1), mubnds (1、2), LinMagopt);包含(的频率(rad /秒));ylabel (“μ上/下界限”);标题(μ情节的鲁棒稳定性的利润率(倒规模));
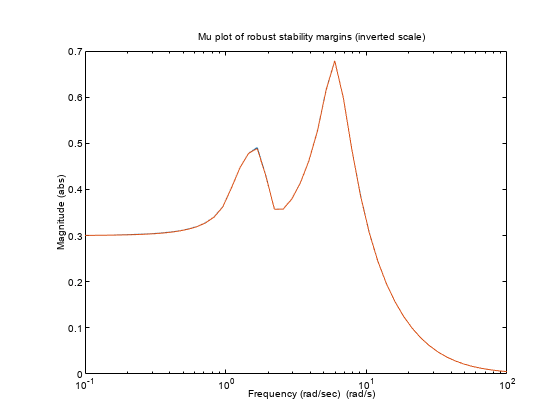
图3:μ的鲁棒稳定性的利润率(倒规模)
鲁棒稳定性裕度的倒数是结构化的奇异值。因此上界从mussv成为下界的稳定裕度。让这些转换,找到μ上界的不稳定频率的峰值(即稳定裕度的最小):
[pkl, wPeakLow] = getPeakGain (mubnds (1、2);(北大)= getPeakGain (mubnds (1,1));SMfromMU。下界= 1 /北大;SMfromMU。UpperBound = 1 / pkl;SMfromMU。CriticalFrequency = wPeakLow;
比较SMfromMU的界限stabmarg计算与robstab。的值是粗糙的协议robstab收益率略弱的利润率。这是因为robstab比频率网格使用一种更为复杂的方法,可以准确地计算的峰值μ在频率。
stabmarg
stabmarg =结构体字段:下界:1.4668 e + 00 UpperBound: 1.4697 e + 00 CriticalFrequency: 5.8933 e + 00
SMfromMU
SMfromMU =结构体字段:下界:1.4735 e + 00 UpperBound: 1.4735 e + 00 CriticalFrequency: 5.9636 e + 00
鲁棒性能分析
标称值的不确定因素k和δ闭环增益小于1:
getPeakGain (ClosedLoop.NominalValue)
ans = 9.8137 e-01
这说的控制器K满足干扰抑制和噪声不敏感目标。但是这是名义上的性能维持在建模的不确定性面前?这个问题最好的回答robgain。
选择= robOptions (“显示”,“上”);[perfmarg, wcu] = robgain(闭环,1,选择);
计算峰……完成百分比:100/100一级不健壮的性能建模的不确定性。——获得1仍低于38.6%的模型不确定性。——有一个坏扰动总计38.7%的建模不确定性。——这个扰动会导致增加1的频率0.128 rad /秒。
答案是消极的:robgain发现一个微扰总计只有40%的指定的驱动器不确定性闭环增益为1。
wcu getPeakGain (usubs(闭环),1 e-6)
ans = 1.0000 e + 00
这表明闭环增益将超过1 100%的指定的不确定性。这是证实了计算最坏的获得:
wcg = wcgain(闭环)
wcg =结构体字段:下界:1.5767 e + 00 UpperBound: 1.5799 e + 00 CriticalFrequency: 5.9576 e + 00
最坏的获得约为1.6。这一分析表明,虽然控制器K满足干扰抑制和噪声不敏感目标的名义,无法保持这种级别的性能指定的植物不确定性。