添加应用设计师应用倒立摆模型
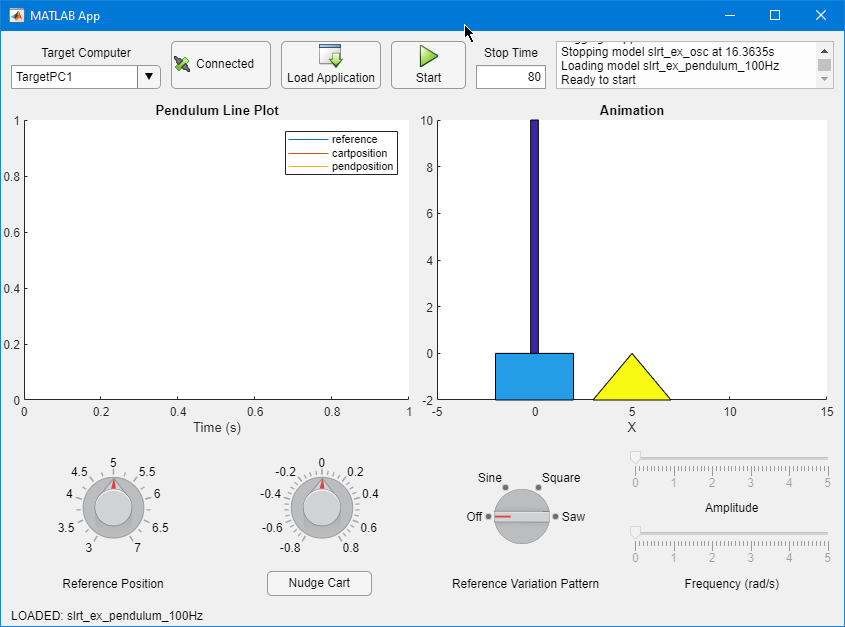
这个例子展示了如何流信号信号应用程序设计师仪表板应用程序从一个仿真软件®实时™应用程序。万博1manbetx从模型构建实时应用的例子slrt_ex_pendulum_100Hz。仪器面板包含这些程序设计师组件:
目标选择下拉列表,显示所有可用的目标计算机。
连接/断开按钮-连接或断开目标计算机选择下拉窗口。
Load按钮,加载应用程序到目标计算机。
启动/停止按钮,启动或停止目标计算机上的应用程序。
停止时间编辑字段——来显示和设置应用程序的停止时间加载到目标计算机。
状态消息框,显示目标计算机状态信息。
轴,显示一个动画两个倒立摆和购物车系统。
轴,显示信号输出响应中断摆。
推购物车按钮——应用输入(推动)的车摆。
参考位置旋钮,改变摆和购物车系统的参考位置。
参考模式旋钮——添加一个变异模式变化的参考位置摆和购物车系统。
振幅滑块-调整振幅的变化模式选择参考。
频率滑块-修改选择引用的频率变化模式。
流信号和参数数据之间的实时应用程序和仪表板应用程序,该应用程序使用仪器的对象。
打开示例和负载模型
openExample (“SlrtAddAppDesignerAppToInvertedPendulumModelExample”);
load_system (fullfile (matlabroot,“工具箱”,“slrealtime”,“例子”,“slrt_ex_pendulum_100Hz”));
目标计算机开始,构建实时应用程序
这些任务生成数据流的实时应用程序到应用程序设计师仪表板应用程序。
启动目标计算机。
开发计算机连接到目标计算机。构建
slrt_ex_pendulum_100Hz模型。实时应用程序部署到目标计算机。
在MATLAB®命令窗口中,键入:
模型=“slrt_ex_pendulum_100Hz”;set_param(模型,“RTWVerbose”,“关闭”);tg = slrealtime;evalc (“slbuild(模型));负载(tg、模型);
运行应用程序设计师仪表板应用程序
应用程序设计师仪表板应用程序slrt_ex_pendulumApp提供启动和控制与实时交互的应用程序slrt_ex_pendulum_100Hz。
1。运行该应用程序,启动应用设计师应用slrt_ex_pendulumApp.mlapp并创建处理应用程序在MATLAB命令窗口类型:
应用= slrt_ex_pendulumApp;
2。与一个可用的目标计算机,点击连接按钮。按钮上的文本将切换到“断开”和负载按钮将被启用。
3所示。加载应用程序到目标计算机,点击负载按钮。目标计算机上的应用程序加载后,开始按钮,停止时间编辑字段将被启用。
4所示。设置应用程序的停止时间,输入您的首选编辑字段,点击停止时间输入按钮。
5。开始运行应用程序,单击开始按钮。
6。破坏的平衡摆每车,点击推动按钮。你可以调整推动级通过旁边的值选择按钮,焊割参考位置通过调整参考位置转轮的价值,或选择一个参考位置的变化模式。
应用回调代码
仪表板应用程序所提供的功能是回调代码。
在回调代码评论仪表板应用程序slrt_ex_pendulumApp.mlapp描述回调操作和编程的建议。查看回调代码,打开slrt_ex_pendulumApp.mlapp在应用程序设计师,然后单击代码视图选项卡。在命令窗口中,输入:
编辑slrt_ex_pendulumApp
指定块路径信号
从信号流数据模型中,看到的使用connectLine函数的setupInstrumentation(应用)函数的应用。
updateAnimationCallback函数
对于每个AcquireGroup,这个函数检查是否有新数据自最后一次回调。如果有数据,更新动画对象的函数。
信号放在获得团体基于采样率和大量毁灭,收购集团中的所有信号同时向量。
更新轴通过使用获得团体和动画
在回调代码中,这个过程是可见的AcquireGroupData信号组updateAnimationCallback函数。
关闭应用程序和模型
仪表板应用程序处理应用程序提供关闭应用程序的访问。
关闭应用。在MATLAB命令窗口中,类型:
关上(app.UIFigure)
关闭打开的模型。在命令窗口中,输入:
bdclose (“所有”);