Derive and Apply Inverse Kinematics to Two-Link Robot Arm
该示例通过使用MATLAB®和Symbolic Math Toolbox™来推导并将逆运动学应用于两连锁机器人组。
该示例象征性地定义了关节参数和最终效应器位置,计算和可视化运动和逆运动溶液,并找到系统jacobian,这对于模拟机器人组的运动很有用。万博 尤文图斯
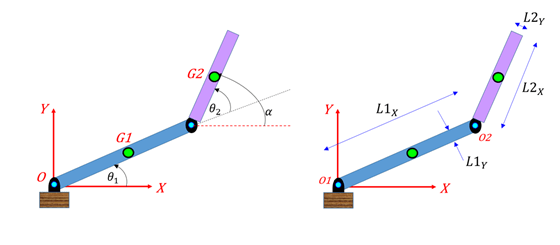
Step 1: Define Geometric Parameters
将机器人的链路长度,关节角度和最终效应器位置定义为符号变量。
symsL_1L_2theta_1theta_2XEYE
指定机器人链路长度的值。
L1 = 1;L2 = 0.5;
Step 2: Define X and Y Coordinates of End Effector
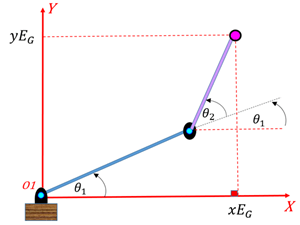
定义最终效应器的X和Y坐标作为关节角度的函数 。
XE_RHS = l_1*cos(theta_1) + l_2*cos(theta_1 + theta_2)
XE_RHS =
YE_RHS = L_1*sin(theta_1) + L_2*sin(theta_1+theta_2)
YE_RHS =
Convert the symbolic expressions into MATLAB functions.
XE_MLF = matlabFunction(XE_RHS,'Vars',[L_1 L_2 theta_1 theta_2]); YE_MLF = matlabFunction(YE_RHS,'Vars',[L_1 L_2 theta_1 theta_2]);
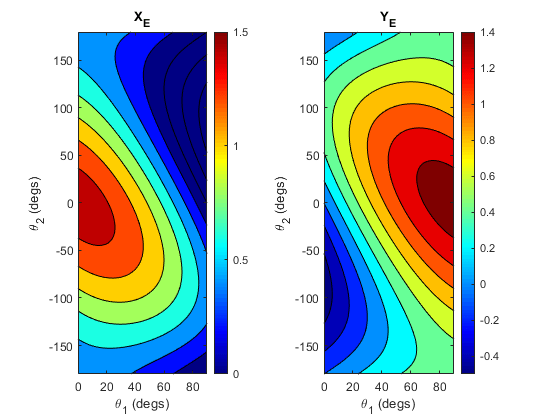
Step 3: Calculate and Visualize Forward Kinematics
向前运动学将关节角度转化为最终效应的位置: 。Given specific joint-angle values, use forward kinematics to calculate the end-effector locations.
将关节角的输入值指定为 和 。
t1_degs_row = linspace(0,90,100);t2_degs_row = linspace(-180,180,100);[tt1_degs,tt2_degs] = meshgrid(t1_degs_row,t2_degs_row);
Convert the angle units from degrees to radians.
tt1_rads = deg2rad(tt1_degs); tt2_rads = deg2rad(tt2_degs);
Calculate the X and Y coordinates using the MATLAB functionsXE_MLF和YE_MLF, respectively.
X_mat = XE_MLF(L1,L2,tt1_rads,tt2_rads); Y_mat = YE_MLF(L1,L2,tt1_rads,tt2_rads);
使用辅助功能可视化X和Y坐标plot_xy_given_theta_2dof。
plot_xy_given_theta_2dof(tt1_degs,tt2_degs,x_mat,y_mat,(l1+l2))
Step 4:查找逆运动学
Inverse kinematics transforms the end-effector locations into joint angles: 。从正向运动学方程式找到逆运动学。
Define the forward kinematics equations.
XE_EQ = XE == XE_RHS; YE_EQ = YE == YE_RHS;
解决 和 。
s =solve([XE_EQ YE_EQ], [theta_1 theta_2])
s =带有字段的结构:theta_1: [2x1 sym] theta_2: [2x1 sym]
结构S代表多个解决方案万博 尤文图斯
和
。Show the pair of solutions for
。
简化(s.theta_1)
ans =
Show the pair of solutions for 。
简化(s.theta_2)
ans =
Convert the solutions into MATLAB functions that you can use later. The functionsTH1_MLF和TH2_MLF代表逆运动学。
TH1_MLF{1} = matlabFunction(S.theta_1(1),'Vars',[l_1 l_2 xe ye]);th1_mlf {2} = matlabFunction(s.theta_1(2),'Vars',[l_1 l_2 xe ye]);th2_mlf {1} = matlabFunction(s.theta_2(1),'Vars',[l_1 l_2 xe ye]);th2_mlf {2} = matlabFunction(s.theta_2(2),,'Vars',[l_1 l_2 xe ye]);
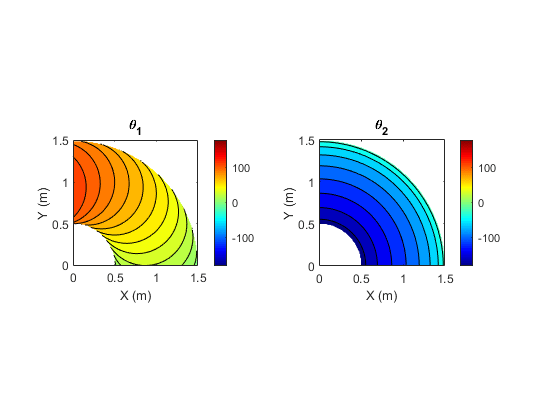
步骤5:计算和可视化逆运动学
Use the inverse kinematics to compute 和 from the X and Y coordinates.
定义X和Y坐标的网格点。
[xmat,ymat] = meshgrid(0:0.01:1.5,0:0.01:1.5);
Calculate the angles
和
使用MATLAB功能sTH1_MLF{1}和th2_mlf {1}, respectively.
tmp_th1_mat = TH1_MLF{1}(L1,L2,xmat,ymat); tmp_th2_mat = TH2_MLF{1}(L1,L2,xmat,ymat);
Convert the angle units from radians to degrees.
tmp_th1_mat = rad2deg(tmp_th1_mat); tmp_th2_mat = rad2deg(tmp_th2_mat);
Some of the input coordinates, such as (X,Y) = (1.5,1.5), are beyond the reachable workspace of the end effector. The inverse kinematics solutions can generate some imaginary theta values that require correction. Correct the imaginary theta values.
th1_mat = NaN(size(tmp_th1_mat)); th2_mat = NaN(size(tmp_th2_mat)); tf_mat = imag(tmp_th1_mat) == 0; th1_mat(tf_mat) = real(tmp_th1_mat(tf_mat)); tf_mat = imag(tmp_th2_mat) == 0; th2_mat(tf_mat) = real(tmp_th2_mat(tf_mat));
Visualize the angles
和
using the helper functionplot_theta_given_XY_2dof。
plot_theta_given_XY_2dof(xmat,ymat,th1_mat,th2_mat)
Step 6: Compute System Jacobian
系统的定义雅各比式是:
the_j = jacobian([xe_rhs ye_rhs],[theta_1 theta_2])
the_J =
您可以通过使用系统Jacobian将联合速度与最终效应速度相关联,而另一方面的方式将关节速度联系起来:
MATLAB
您还可以将雅各布的符号表达式转换为MATLAB功能块。通过将多个路点定义为simulink®模型的输入,模拟机器人在轨迹上的最终效应器位置。万博1manbetxSimu万博1manbetxlink模型可以根据关节角度值计算运动核心,以达到轨迹中的每个路点。有关更多详细信息,请参阅2链接机器人臂的逆运动学和教僵硬的身体动态。
Helper Functions
功能plot_theta_given_XY_2dof(X_mat,Y_mat,theta_1_mat_degs,。。。theta_2_mat_degs)xlab_str ='x(m)';ylab_str ='y(m)';数字;hax(1)=子图(1,2,1);contourf(X_mat, Y_mat, theta_1_mat_degs); caxis(hax(1), [-180 180]); colormap(gca,'jet'); colorbar xlabel(xlab_str,“口译员”,'Tex'); ylabel(ylab_str,“口译员”,'Tex'); title(hax(1),'\ theta_1',“口译员”,'Tex') axis('平等的') hax(2) = subplot(1,2,2); contourf(X_mat, Y_mat, theta_2_mat_degs); caxis(hax(2), [-180 180]); colormap(gca,'jet'); colorbar xlabel(xlab_str,“口译员”,'Tex'); ylabel(ylab_str,“口译员”,'Tex'); title(hax(2),'\ theta_2',“口译员”,'Tex') axis('平等的')end功能plot_xy_given_theta_2dof(theta_1_mat_degs,theta_2_mat_degs,。。。x_mat,y_mat,a_cmax)xlab_str ='\ theta_1(degs)';ylab_str ='\theta_2 (degs)';数字;hax(1)=子图(1,2,1);CONTOURF(theta_1_mat_degs,theta_2_mat_degs,x_mat);Caxis(hax(1),[0 a_cmax]);colormap(GCA,'jet'); colorbar xlabel(xlab_str,“口译员”,'Tex'); ylabel(ylab_str,“口译员”,'Tex'); title(hax(1),'X_E',“口译员”,'Tex') hax(2) = subplot(1,2,2); contourf(theta_1_mat_degs, theta_2_mat_degs, Y_mat); caxis(hax(1), [0 a_cmax]); colormap(gca,'jet'); colorbar xlabel(xlab_str,“口译员”,'Tex'); ylabel(ylab_str,“口译员”,'Tex'); title(hax(2),'Y_E',“口译员”,'Tex')end