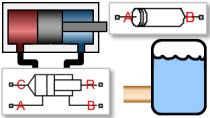
Simscape™多体™中使用广泛的应用程序。生产系统与机器人拾起并定位机制显示出模拟可以帮助工程师选择电机和驱动器,设计控制逻辑,优化机器人的轨迹。机器人的力学模型从CAD软件进口,包括几何形状,质量,惯性,和关节。机器人能够接对象从一个传送带,将它们移动到另一个。机器人系统是集成了一个状态机在Stateflow建模®并从Simscape电气™与电机模型。液压系统连接到Simscape多体模型在一个反铲的例子,这表明工程师可以使用模拟识别集成问题在设计过程的早期。三个液压致动器建模Simscape液体™在液压网络相连。模型集成了机械和液压设计在一个模拟的环境。塔式起重机的例子表明,复杂cable-driven机制可以在Simscape多体建模。电缆用于提高和降低负载,并沿着起重机移动小车。滑轮约束同步旋转滑轮和线轴的物理系统,使移动负载所需力矩的计算。起重机的模型从CAD软件进口。