理解模型预测控制
在本系列中,您将学习模型预测控制(MPC)是如何工作的,并且你会发现这种多变量控制技术的好处。
MPC系统的使用模型对系统的未来行为进行预测。MPC解决在线优化算法寻找最优控制行动,推动预测输出参考。MPC能够处理多输入多输出系统,可能他们的输入和输出之间的相互作用。它也可以处理输入和输出约束。MPC预览功能;它可以将未来的参考信息合并到改善控制器性能的控制问题。
本系列还讨论了MPC控制器等设计参数样本,预测和控制的视野,约束和权重。它也给了你建议选择这些参数。您将了解适应性、gain-scheduled和非线性MPC,和你会得到实现技巧减少MPC的计算复杂度和运行更快。
最后,设计线性系列演示例子,自适应、非线性MPC控制器模型预测控制工具箱®

为什么使用货币政策委员会?学习模型预测控制(MPC)。MPC与输入输出交互处理MIMO系统,处理约束,预览功能,用于汽车和航空等行业的竞争。
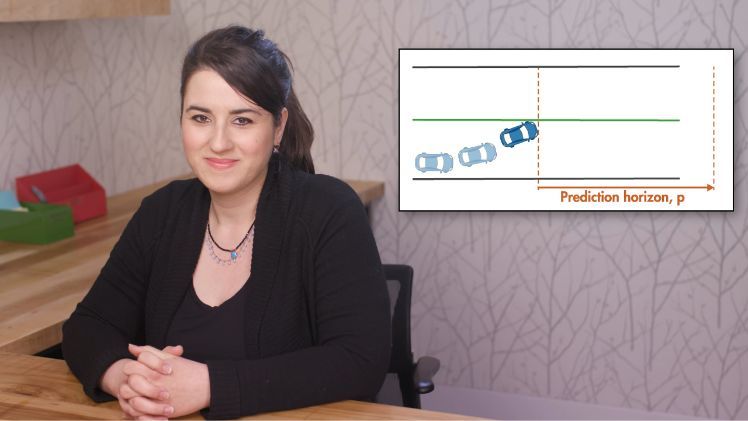
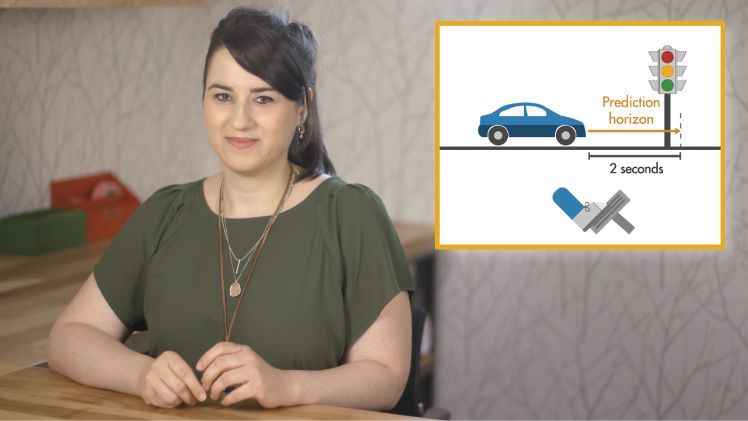
MPC是什么?学习模型预测控制(MPC)是如何工作的。MPC使用植物对未来进行预测的模型输出。它解决了一个优化问题在每个时间步找到最优控制行动,推动预测植物尽可能输出所需的参考。
MPC设计参数成功使用MPC控制系统,您需要仔细选择设计参数。学习如何选择控制器的样品时间,预测和控制视野,约束和权重。

自适应、Gain-Scheduled和非线性MPC了解MPC控制器的类型,您可以使用基于你的植物模型,约束和成本函数。选项包括线性定常、自适应gain-scheduled,非线性MPC。
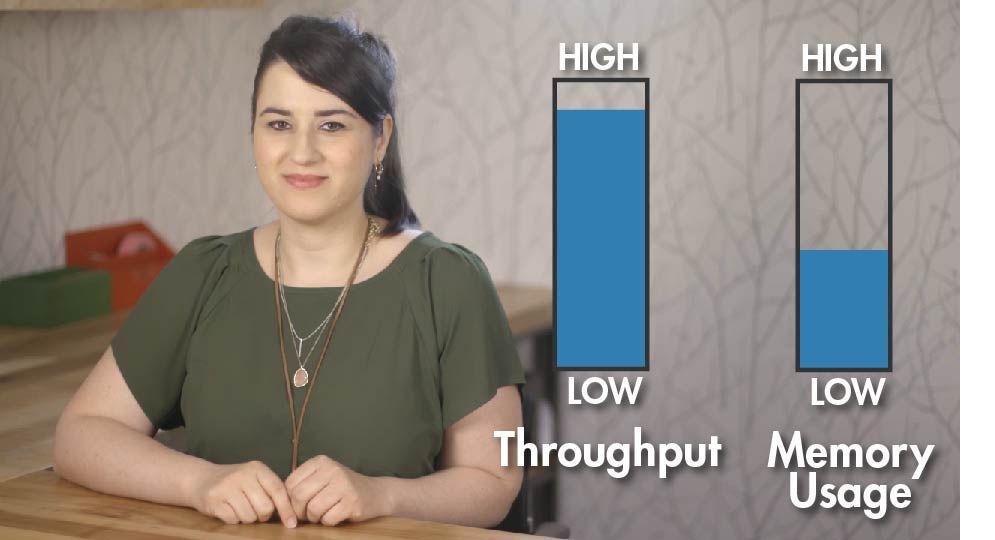
如何运行MPC更快呢学习技术可以用来运行MPC更快。视频大纲方法,如明确的MPC和次优的解决方案,可以实现对小样本应用程序。
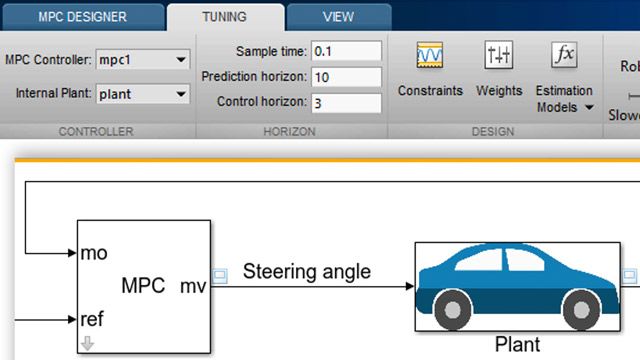
如何设计一个MPC控制器模型和模型预测控制工具箱万博1manbetx学习如何设计一个MPC控制器自主车辆转向系统使用模型预测控制工具箱。
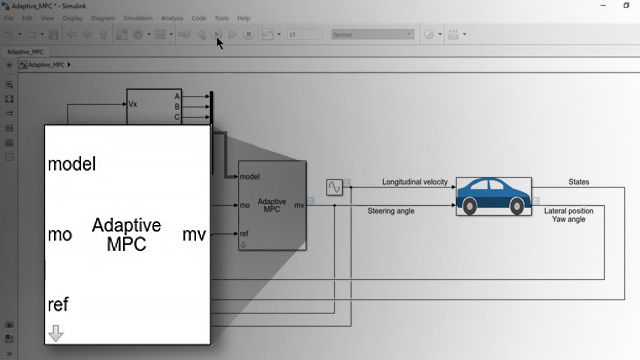
自适应MPC设计与仿真软件和模型预测控制工具箱万博1manbetx学习如何处理使用自适应MPC改变植物动力学。这个视频中使用一个自主驾驶车辆系统的例子来演示控制器的设计。
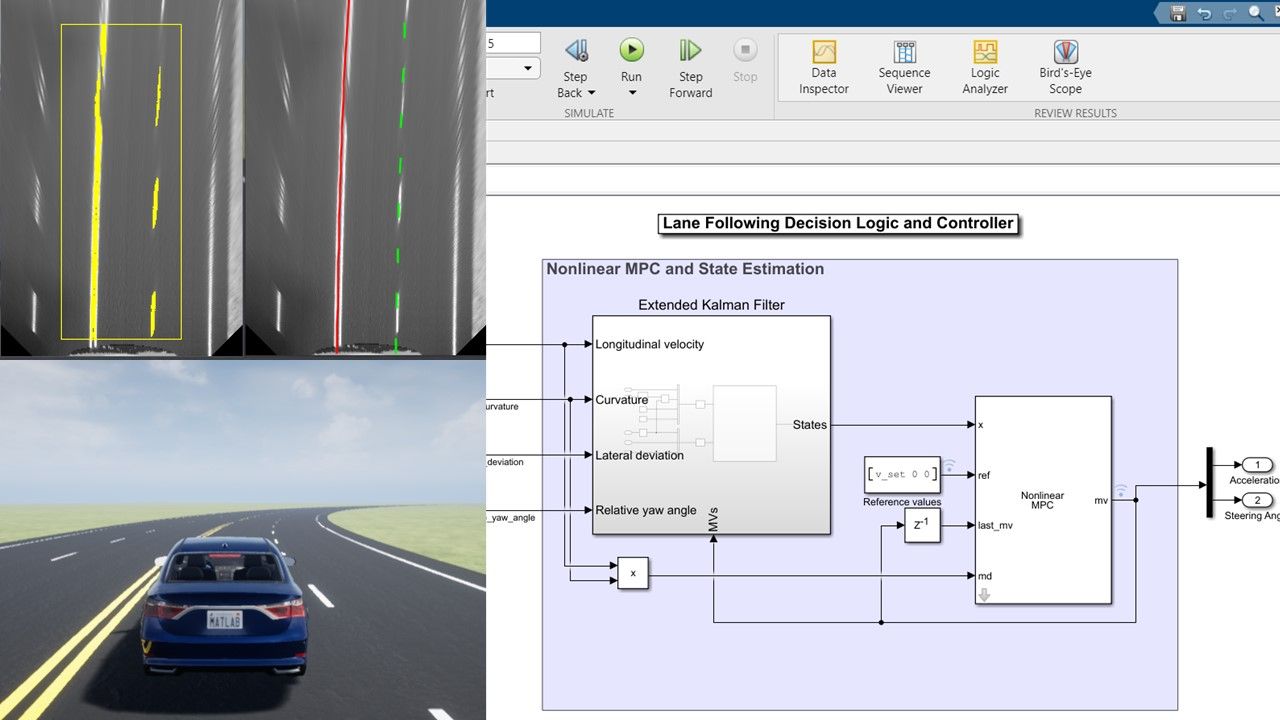
非线性与模型预测控制工具箱和FORCESPRO MPC设计学习如何设计一个非线性MPC控制器为一个自动驾驶的应用程序模型预测控制工具箱,Embotech FORCESPRO解决者。

非线性MPC部署Speedgoat硬件进行实时检测学习如何生成代码从一个非线性mpc算法自动驾驶应用程序生成的代码,并将其部署到Speedgoat硬件进行实时检测。