针对帕克在太阳太阳探测器模型GNC的软件万博1manbetx
由格雷格·德雷亚安德拉德,MathWorks
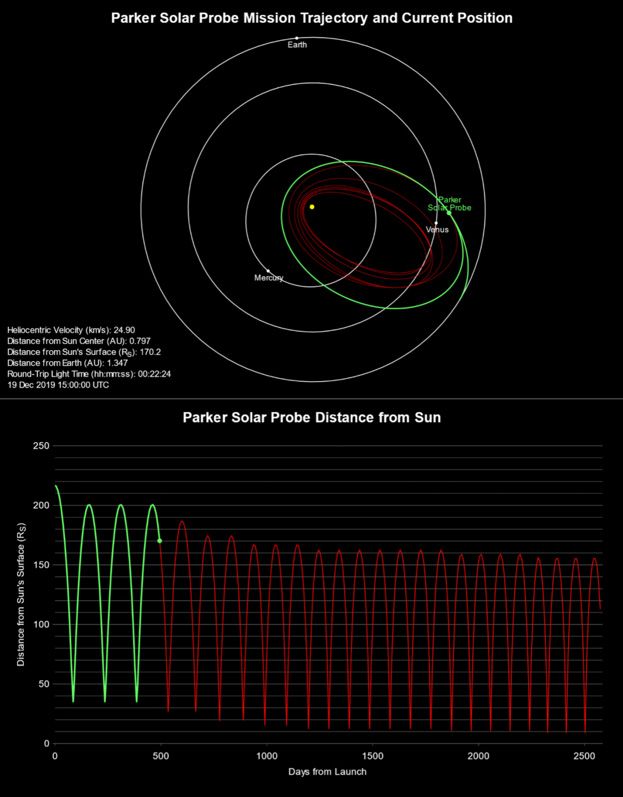
周一,2018年11月5日,帕克太阳探测器(PSP)达到第一近日点,通过接近太阳表面比以往任何航天器所做的(图1)。即使在最高时速213200英里每小时,需要飞船后面几天通过太阳和出现在另一边。在这段时间里,研究人员和工程师在NASA和约翰霍普金斯大学应用物理实验室(JHU APL)焦急地等待着第一个状态灯塔。周三,11月7日,接收到的信号是:帕克太阳探测器在操作状态”,“与所有的科学仪器运行并收集数据。

不到两周后,帕克太阳探测器恢复完整的联系。调查每个子系统的状态,APL团队的兴奋了。科学记录充满了正如预期的那样,飞船保持了态度,在正确的轨迹。在近七年的使命,帕克太阳探测器将环绕太阳24倍,未来逐步接近每七金星重力辅助飞越383万英里内,直到通过,近距离飞过太阳大气层(图2)。
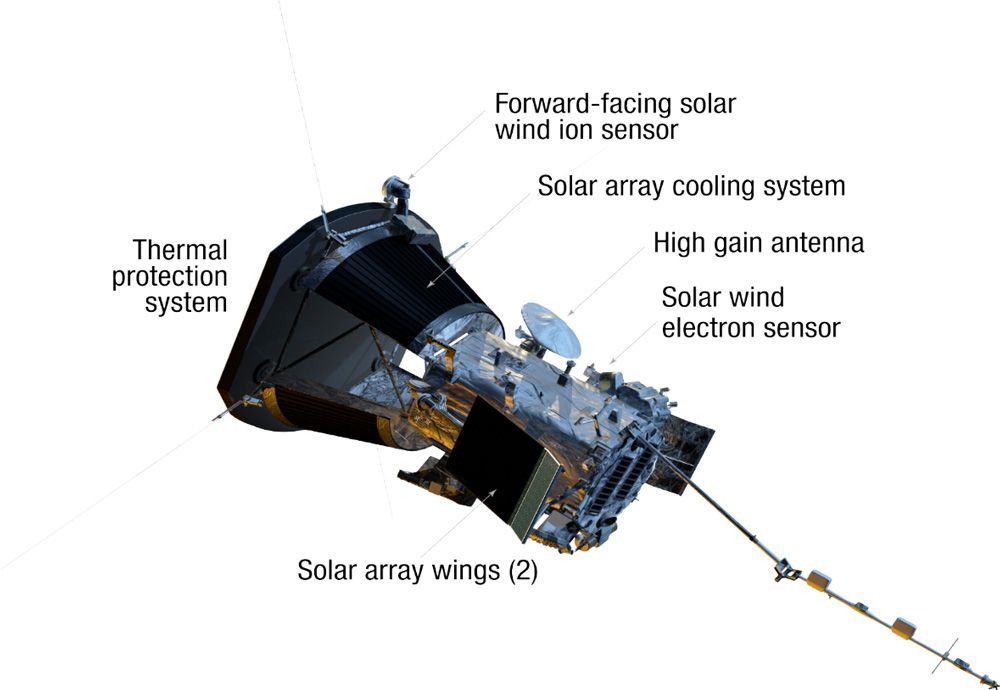
确认帕克太阳探测器做了第一次接触太阳指导尤为受欢迎的消息,导航和控制在JHU APL (GNC)团队,负责开发的航天器的姿态控制算法。使用仿真软件设计、实现和验证万博1manbetx®,这些算法是关键任务:他们不仅控制飞船的方向,他们也保持其碳复合热保护系统(TPS)朝向太阳。1 -或2摄氏度偏差在定向TPS的区别可能意味着成功的使命和毁灭的宇宙飞船。
指导和控制设计约束
帕克在绕太阳公转,太阳探测器将受到热强烈475倍比地球的轨道上的经验。这意味着姿态控制系统必须东方帕克太阳探测器,它是不断TPS的保护。
因为太阳是太阳系中最大的和最聪明的对象,乍看起来简单保持飞船面向。然而在实践中,帕克太阳探测器姿态控制是相当复杂。挑战之一是在近日点附近,没有传感器,为姿态控制算法提供输入数据实际上是指向太阳。相反,他们被定位在TPS保护他们免受太阳热辐射(图3)。
两个星球离太阳跟踪器指出可以用来衡量取向从恒星的位置,但设计团队必须计划可能近日点附近,这些传感器将不可用。飞船配备两个数字太阳敏感器(DSS),但它们只能用于远离太阳。太阳能翼传感器(SLS)设计用于近距离使用,但他们只发现太阳的边缘时,飞船开始旋转远离其理想的态度。开发一个容错系统的每一段轨道,这是至关重要的,以确保足够的硬件被放置在车辆和纳入控制算法。
第二个挑战是,控制算法必须改正的态度使用尽可能少的电力和推进器推进剂。接近太阳,帕克太阳探测器的太阳能电池板仍然几乎完全在TPS的影子,这样他们不融化。扩展板增加了对他们施加压力,导致不必要的扭矩。此外,燃料使用的飞船推进器必须谨慎,以确保供应将持续多年的使命。
开发一个真理模型
宇宙飞船的“真相”模型,建立了MATLAB®、仿万博1manbetx真软件和Simscape多体™,本质上是一个植物模型来捕获轨道的影响,物理交互和其他航天器动力学(图4)。

图4。帕克太阳能探测植物模型,由近1400块和1811行MATLAB代码。
随着时间的推移,许多子系统纳入模型,包括电池子系统,推进器,星跟踪器和惯性测量单元。该小组还模拟了太阳能电池阵列之间的身体关节和主要公共汽车。随着模型变得越来越复杂,他们能够越来越准确的模拟运行。例如,他们加入了一个子系统模型对航天器推进剂晃动动力学的影响。
开发GNC飞行软件
最初的姿态控制系统设计不包括反应轮子。只使用推进器管理动力和改正的态度是一个可能的方法来减少质量和功耗。测试这种方法的可行性,GNC团队建模的几种控制器的设计,其中包括脉宽脉冲频率调制器,与真理和跑闭环模拟模型。控制器的设计看上去有前途,没有保证的任务可以完成没有轮子的反应。幸运的是,随着设计成熟,团队能够为反应轮子。这大大简化了整体设计和允许提高科学观察的准确性和稳定性。
他们创造了一个系统,non-propulsively通过反应轮子和火灾管理动力推进器抛售势头当车轮达到指定的水平。他们从thruster-only重用的大部分工作仿真软件模型设计的控制器。万博1manbetx完全,控制器模型包括超过22000块和近1200行MATLAB代码(图5)。

图5。控制器模型。
因为无情的环境,帕克太阳探测器将操作,数量空前的模拟进行。事实上,正式的模拟的数量是增加了超过一个数量级,而前面的任务由JHU APL。模拟了正常操作场景,包括动量转储和轨迹校正动作,和故障场景。
大多数飞船设计容错系统,但对于这个任务,太阳能条件比以往任何飞船经历过更极端。例如,失去一颗恒星跟踪器飞船被认为是一个严重的错误,但对于帕克太阳探测器,有必要计划不仅仅是一个,而是两个星跟踪器的可能性可以蒙蔽一个太阳能事件和额外的错误可能发生在同一时间。
代码生成和试验台验证
初始验证通过闭环控制器的设计进行了模拟仿真软件。万博1manbetx从控制器模型生成代码后使用仿真软件编码器™,团队跑software-in-the-loop(银)的模拟控制模万博1manbetx型替换为生成的代码。
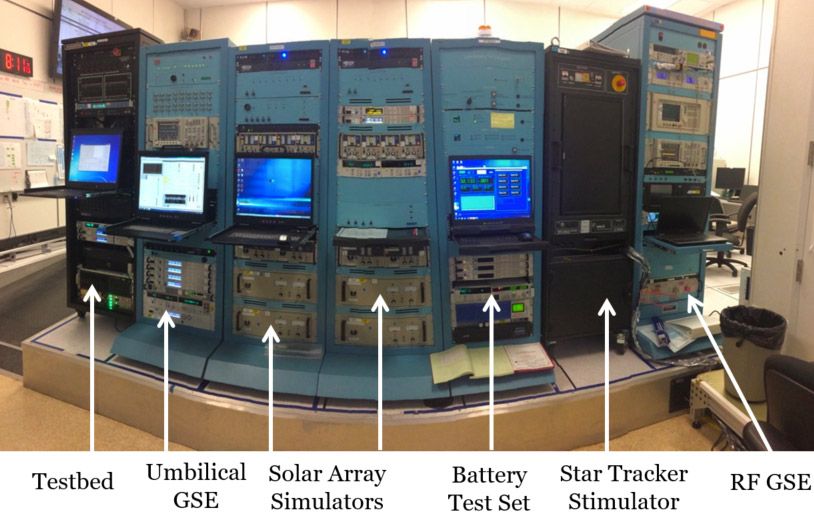
SIL测试和代码优化后,控制设计验证JHU APL测试床(图6)。这个阶段,生成的代码模型姿态控制模型交给飞行软件集团,谁把它融进了帕克太阳能探测飞行软件。万博1manbetx真理的团队也发表了代码模型试验台集团,谁综合试验台,模拟帕克太阳探测器硬件。验收测试的飞行软件然后进行测试床。接近推出,更多的试验台模拟组件替换为实际硬件组件集成在飞船;例如,模拟车轮被替换成真实的反应。
做任务的调整
周日,2018年8月12日,帕克太阳探测器发射的德尔塔IV重型火箭从卡纳维拉尔角空军基地,佛罗里达州(图7)。除了传达科学数据传回地球,宇宙飞船发送遥测数据,我们的团队在仿真软件仿真结果进行了对比和分析。万博1manbetx他们已经精炼和校准我们的真理模型基于这些比较。

宇宙飞船,包括姿态控制系统,设计了自主操作,部分是因为它可以超过15分钟的无线电信号到达地球。不过,有三种方式进行任务调整:发送命令执行预先计划的动作或行为,修改飞行软件参数,或更新飞行软件本身。自推出以来,团队表现两个软件更新,将验证使用更新后的真实模型的改进。
随着任务的继续,帕克太阳探测器轨道将成为紧缩和轨道之间的时间短。MATLAB APL团队正在开发自动化工具,使他们快速分析新航天器和快速响应的数据足以让任何需要更改之前第二次飞越。控制软件已经表现很不错——事实上,它已经远远超出了预期。
2020年出版的