神经科学家经常研究神经元的电生理学——大脑内部神经元的电活动——以更好地了解特定行为以及与大脑有关的疾病的基础过程,如精神分裂症、阿尔茨海默病和帕金森氏病。
Cell-targeted patch-clamping是一个经过验证的技术测量个体神经元的电活动,但它极具挑战性手动执行,特别是 体内;它需要双光子显微镜和微操作器同时操作,以引导移液管与完好的大脑中的目标细胞接触(细胞通常会随着移液管的运动而移动,因此需要多个吸管位置调整,以弥补细胞运动)和应用程序的足够的吸突破细胞膜(图1)。世界上为数不多的研究人员可以执行手动patch-clamping靶向细胞体内 成功率约为20%。

图1所示。测量单个神经元的电活动体内与cell-targeted patch-clamping。
在爱德华·博伊登的在麻省理工学院媒体实验室和研究所麦戈文研究小组的工作,我开发了一个系统,可自动细胞靶向膜片钳 体内,使得更多的神经科学家能够在他们的实验室中应用这项技术。通过MATLAB实现® app, my Imagepatcher software processes images from a two-photon microscope, sends commands to a four-axis micromanipulator, and applies suction by controlling electronic pressure regulators and valves. In the living mouse brain, the initial implementation of the Imagepatcher system performed as well as experienced neuroscientists, and with success rates that matched or exceeded theirs.
如何手动膜片钳厂
Cell-targeted patch-clamping是一个多级的过程当吸管的一角开始进入接触目标细胞(图2)。手动完成第一阶段,研究人员使用一个双光子显微镜来确定目标细胞显微操纵器来操纵吸管进入视野。研究人员一手操作显微镜,一手操作微操作器,将移液管尖端逐渐向目标细胞移动,当移液管尖端接近细胞膜时,对细胞运动进行仔细的补偿,并进行多轮显微镜聚焦和视场调整。
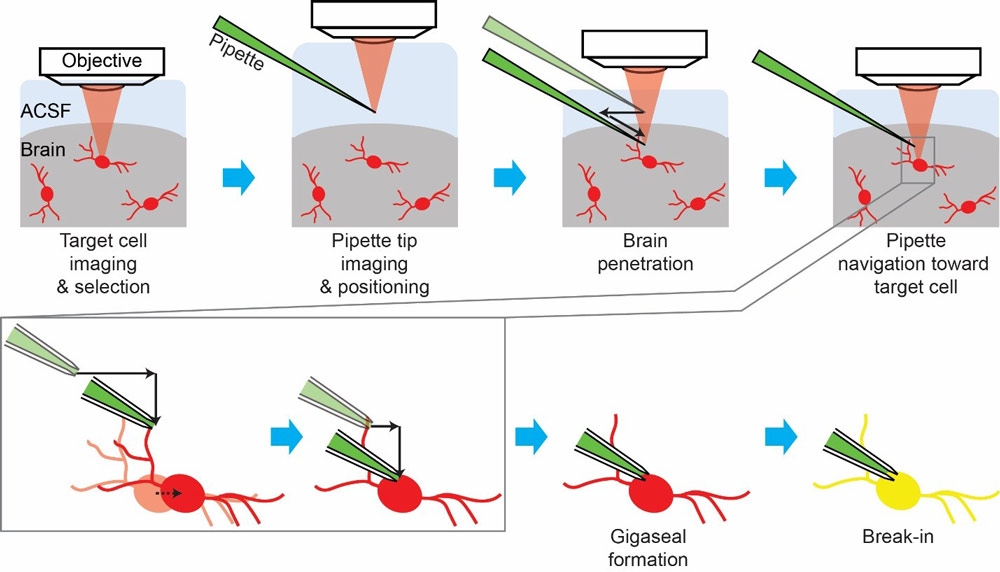
图2.阶段在细胞靶向膜片钳过程。ACSF = artificial cerebrospinal fluid; red = fluorescent cells; green = patch pipette filled with fluorescent dye; light red = laser for two-photon imaging; black solid arrows = pipette movements; black dotted arrow = cell movement; yellow = target cell filled with the fluorescent dye from the pipette.
在移液管尖端确认测得的电阻的突然改变,所述尖端与所述细胞接触。在这一点上,研究人员必须迅速从显微到注射器改变焦点。的注射器,其末端连接到经由中空管吸移管的背面,用于施加抽吸到移液管,以帮助建立一个 千兆欧密封中,尖端和细胞膜与移液管尖端的接触补片之间的紧密密封; giga 指阻力大于1 gigaohm (1 G Ω)。研究人员然后应用一系列吸脉冲实现 打破中,细胞膜的膜片,它可以访问的小区的内部的破裂。这种状态被称为 全细胞配置,可以对细胞的电活动进行高质量的记录。为了获得高质量的记录,研究人员必须在尽可能少的损害细胞的情况下进行整个过程。
从MATLAB中访问和控制实验室设备
要自动涉及膜片钳的众多的手工操作,我需要MATLAB和所涉及的每个三种仪器之间的接口:双光子显微镜的显微操作和控制中的压力在所述移液管尖端的电子压力调节器和阀,(图3)。The interface to the microscope was provided by ScanImage, an open-source software package for microscope control maintained by Vidrio技术。我用了ScanImage来控制图像采集的所有方面,包括何时和如何从显微镜在MATLAB处理捕获的图像。到显微操纵器的接口是由制造商(Sensapex)的文库提供。我用这个库来控制移液管的运动与来自MATLAB内以均匀的速度。我公司开发的接口连接到调节器和使用国家仪器数据采集(DAQ)板和仪器控制工具箱™阀。
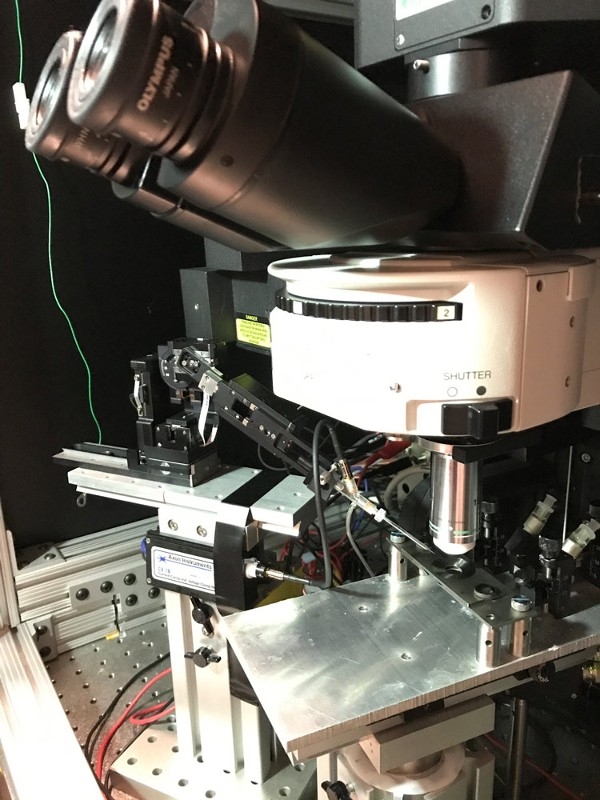
图3. Imagepatcher设置。
实现Imagepatcher控制循环
该Imagepatcher软件包括三个主要的控制回路。每个循环在MATLAB运行。所述第一管理移液管的运动,直到它的尖端接触的有针对性的神经元,该第二施加吸力,以形成千兆欧密封,并且第三施加吸力脉冲实现盈亏英寸在补丁夹紧过程中,Imagepatcher软件自主运行这些控制回路。一个MATLAB基于接口使研究者来管理和监视的程序(图4)。
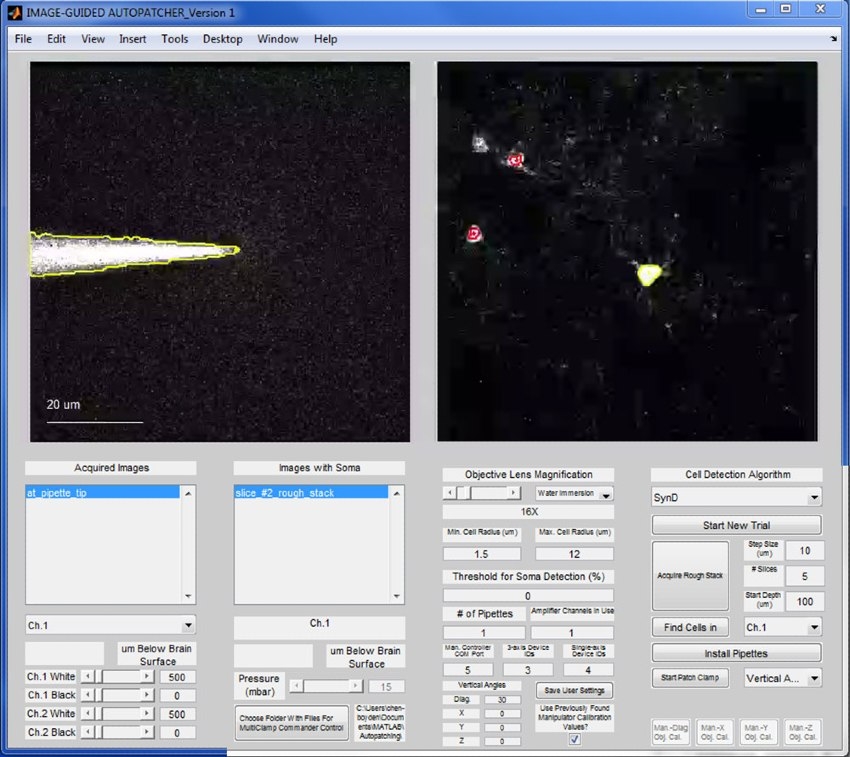
图4. Imagepatcher接口。
用于第一控制环的算法从显微镜获取图像,对其进行分析以识别所述小区计算小区和所述移液管尖端之间的偏移,并且将命令发送到微操纵器来移动所述移液管更靠近小区。重复这些步骤,直到吸液管已达到其目标,通过在移液管尖端测量的电阻的急剧变化信号通知。
内该循环中,我调用的图像处理功能,以分析由显微镜产生的图像。首先,我使用2D维纳滤波器以去除光子噪声,这似乎为图像中的高强度光斑。接下来,我应用阈值函数来产生隔离荧光标记的细胞图像的二进制版本。然后我的二进制图像进行形态学操作,以确定 形心 of the cell—the point within the cell boundary that I target with the pipette. I use a similar procedure, before the start of the loop, to isolate the pipette in the image and identify its tip (Figure 5). This initial location of the tip is used to calculate the tip position following pipette movements within the loop. After computing the offset between the cell centroid and the pipette tip in three dimensions, the algorithm generates the micromanipulator commands needed to move the pipette and sends the commands to the micromanipulator via a serial interface.
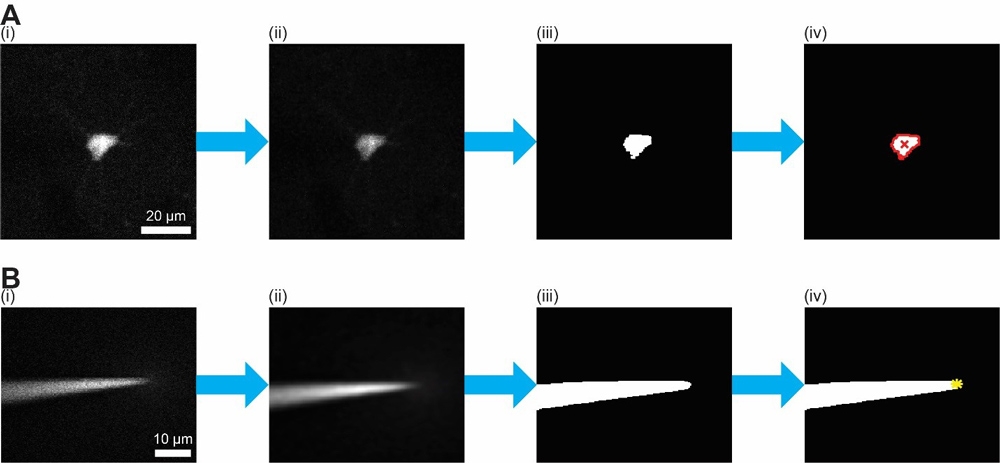
图5。图像处理步骤:检测(A)目标细胞的质心(B)移液管尖端,显示(i)原始显微镜图像,(ii)滤波图像,(iii)二值图像,(iv)二值图像与检测特征的叠加。红色轮廓=细胞的轮廓;红色x =细胞的形心;黄星=移液管尖端。
一旦吸管到达细胞,Imagepatcher进入压力控制回路。在此,该算法通过使用MATLAB和数据采集工具箱™以产生用于其四个电子阀的设置的三个电子压力调节器的模拟信号和数字信号处创建的移液管尖端的压力。The algorithm dynamically changes pressure until the resistance measured at the tip reaches 1 GΩ. The pressure control algorithm uses heuristics to speed up the formation of a gigaseal—for example, if the measured resistance is well below 1 GΩ and rising slowly, the algorithm increases the suction significantly, whereas if the resistance is steadily rising, it maintains the existing pressure and waits for the gigaseal to form.
第三和最后控制循环用于打入细胞膜。原来,Imagepatcher自动拉开序幕这个循环中实现了千兆欧密封后,但同事们指出,一些研究者倾向于磨合(即细胞贴附录音)之前采取录音。细胞贴附记录不提供的作为全细胞记录(例如,亚阈值活动)信息相同的水平,但一些研究需要由完整细胞记录。为了适应这一要求,Imagepatcher被配置为暂停和与所述第三控制回路继续之前等待操作员的确认。
为了发起磨合,Imagepatcher施加随压力增加,而再次监视在所述移液管的尖端测量的电阻的一系列抽吸脉冲。When the cell membrane ruptures, the measured resistance falls from more than 1 GΩ to a few hundred megaohms. When break-in is achieved, Imagepatcher halts suction, and the researcher can begin recording.
初始结果与计划增强
第一个版本的Imagepatcher匹配或稍微超过了有经验的研究者报告的成功率,实现了20-22%的全细胞配置。Imagepatcher完成一个补丁夹夹过程所需的10分钟左右的时间与这些研究人员所需要的时间相当。自动夹片后录制的录音长度(平均约15分钟)和质量与手动夹片后录制的录音相当,这表明Imagepatcher不会比手动夹片对细胞造成更大的损害。最重要的是,Imagepatcher提供了手工方法无法匹配的一致性和一致性,使更多的研究人员能够可靠地执行该过程。事实上,全球已有7家实验室表达了对使用Imagepatcher的兴趣。
我打算实现的增强,这将提高的速度和运作利用硬件的执行不能手动地执行,如抽吸脉冲图案的精确的施用技术能力Imagepatcher的成功率。