大约在7点在2015年9月14日,我收到一封电子邮件从我的同事通知我一个非凡的事件:在欧洲两个探测器的激光干涉引力波天文台(LIGO)同时确定了一个短暂的引力波信号时空“涟漪”。
作为LIGO仪器开发团队的一员,我很兴奋,但也有点担心。我很兴奋,因为如果这个信号是真实的,这将标志着引力波首次被直接观测到,证实了阿尔伯特·爱因斯坦一个世纪前对引力波存在的预测。这也标志着第一次观测到一对黑洞合并成一个黑洞。然而,我和我的同事都很担心,因为我们还不知道这个信号是来自真正的引力波,还是仅仅是LIGO控制系统和仪器出现了一些错误的结果。
我立刻把LIGO的数据下载到我的笔记本电脑上,打开MATLAB®,并开始分析记录的信号并可视化数据。在几个月后,我的利波同事和我确认我们实际上是检测到引力波,并确定了它的来源:两个黑洞的灾难碰撞,综合质量比我们在银河系中的太阳更大60倍。更多超过10亿光年(图1)。
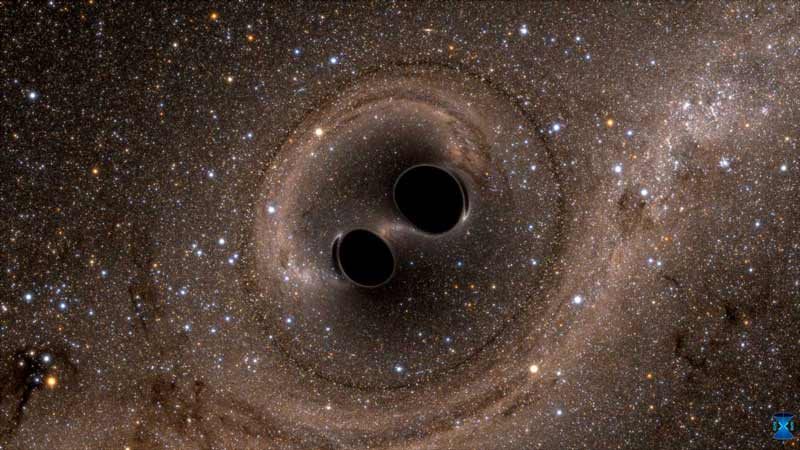
图1.两个黑洞碰撞的计算机模拟。图片礼貌SXS,模拟极端的空间(SXS)项目。
MATLAB是世界上几乎所有设计引力波探测器的团队所使用的语言。当我想设计一个仪器或者观察仪器输出的数据时,它是我使用的第一个工具。对于LIGO,我们用它来分析限制引力波探测器性能的基本噪声,计算我们的干涉仪的光学响应,并验证整个控制链,以确保我们观测结果的有效性。
建立世界最准确的测量位移的仪器
在我们观察到的黑洞碰撞期间,超过1030.千克的质量转化为引力波能量,其中大部分在不到一秒的时间内释放出来。这一事件所辐射出的引力波功率比可观测宇宙中每一颗恒星和星系的光功率之和还要大10倍以上。然而,为了探测它,我们必须设计和制造有史以来最灵敏的测量位移的仪器:两台激光干涉仪,能够测量距离变化的数量级为10-18年米。
Ligo是世界上最大的引力波天文台。它的两个干涉仪分开了超过3000公里,其中一个在路易斯安那州和其他华盛顿。像Ligo中那些这样的干涉仪有两个武器,彼此直角定向。在Ligo网站,每个臂长4公里。我们通过分束器闪耀激光束,将两个输出梁引导到两个臂的端部,在那里它们通过精确定向的镜子反射回(图2)。在稳定状态下,通过每个臂行进相同距离的梁,彼此相位以相位的终端光电探测器遇到。当引力波通过这种结构时,它扭曲了干涉仪的臂,短暂缩短了第一并且延长了第二并且延长了第二个,然后逆转了这种变化。双臂之间的长度差异为ministule-约1/1000th但这足以影响两束光穿过质子臂所需的时间。结果,它们到达光电探测器时相位不一致(在不同的时间),产生了我们可以测量和观察的干涉图样。
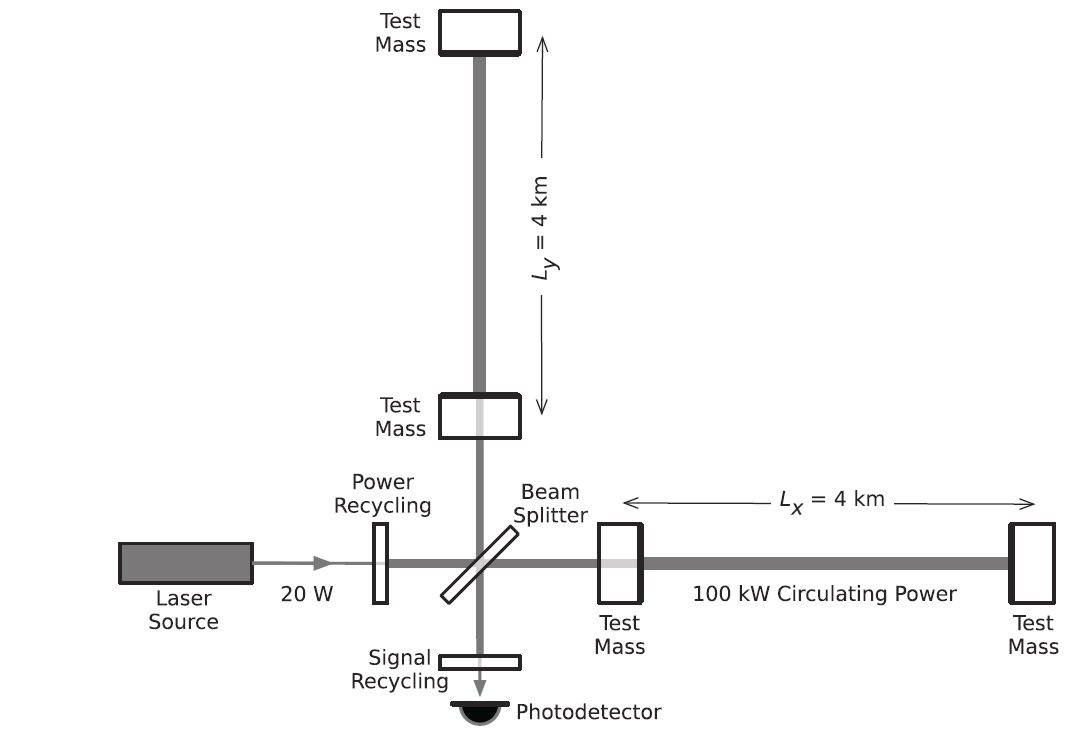
图2。简化的LIGO干涉仪示意图。图片由b.p提供。阿伯特et al。(LIGO科学合作与处女座合作),《双黑洞合并引力波的观测》理论物理。启。1162016年2月11日发布。
由于引力波以光速传播,如果一个引力波经过地球,路易斯安那州和华盛顿的探测器会在大约10毫秒(光在两个地点之间传播的时间)内产生类似的干涉图样。这正是我们的系统在9月14日早上检测到的。
干涉仪设计中的噪声分析和光学建模工具
地球上的许多噪声源都能引起LIGO臂的微小长度变化。为了研究与引力波探测器设计相关的基本噪声,我们使用引力波干涉仪噪声计算器(GWINC)。这个工具完全用MATLAB开发,世界各地的物理学家使用它来计算地震、热、量子和其他限制引力波探测器性能的噪声(图3)。

图3。GWINC图显示了限制探测器性能的主要基本噪声源。
激光干涉引力波干涉仪的设计和持续改进依赖于对噪声影响的透彻理解。它还依赖于理解组成系统的光学——包括分束器、透镜和镜面——在整个系统中是如何协同工作的。为了帮助研究人员进行干涉仪的这方面的设计,我开发了Optickle,这是一个基于MATLAB的工具,用于干涉仪的频域建模和仿真。Optickle为光学设备的元件生成传递函数,使物理学家能够计算和可视化几乎任何干涉仪的光-机械频率响应,包括LIGO(图4)。

图4。Optickle(基于MATLAB的频域建模工具)生成的开环传递函数。
动态更新过滤器
LIGO有数千个数字滤波模块用于噪声抑制和信号处理。目前的LIGO设置相对于其前辈的一个优势是能够在运行中更新这些过滤器。在过去,我们必须关闭电源,然后重新启动系统,这一过程需要一个小时。今天,我们可以在不关闭系统的情况下,在大约一分钟内改变模块中的无限脉冲响应(IIR)滤波器系数。
这种能力是通过我们在MATLAB和Simulink中创建的干涉仪实时控制系统模型实现的万博1manbetx®.例如,为了抑制由海浪撞击海岸引起的微地震峰引起的5赫兹以下的反射镜运动,我们需要改变滤波器,在控制回路中增加更多的增益。在MATLAB中,我们分析了控制系统的反馈回路,并检测了该回路的相位裕度。在绘制必要的传递函数并确定我们可以添加多少增益后,我们生成新的滤波器系数并将它们加载到滤波器模块中——这一切都是在干涉仪运行时进行的。
验证第一次探测,预测下一次探测
在最初的检测之后,我花了几天的时间在MATLAB中分析所有的LIGO数据,以确保信号不是由系统中的错误引起的。为了做到这一点,我在MATLAB中复制了整个控制链和引力波信号路径,包括当时使用的所有滤波器参数,以及检测信号通过系统时的测量。这一分析让我们确信,两个干涉仪捕捉到的信号都来自真正的引力波。
在第一个事件后约三个月,在圣诞节前夕,检测到第二次引力。这个更小,这是两个黑洞的合并的结果,比太阳质量大8和14倍。第二种检测提供了进一步证明第一个没有侥幸,并证实我们已经进入了重力波浪天文的新时代。
引力波让我们对宇宙有了全新的认识,使我们能够研究以前看不见的事物。我期待着在MATLAB中探索每一个新探测的数据,并使用我们开发的工具进一步改进引力波探测仪器。