用于快速参考跟踪的PID控制器设计
这个例子展示了如何使用PID调谐器为工厂设计一个控制器:
设计要求闭环系统跟踪基准输入,上升时间小于1.5 s,稳定时间小于6 s。
在本例中,您将该植物表示为线性时不变模型.查阅有关使用PID调谐器调一个PID控制器块在Simulink中万博1manbetx®模型中,看到优化PID控制器的参考跟踪或干扰抑制(万博1manbetx仿真软件控制设计).
创建工厂模型并打开PID调谐器设计了一个PI控制器进行了一次通设计。
Sys = zpk([],[-1 -1 -1],1);pidTuner (sys,“π”)

当你打开PID调谐器,它会自动设计一个你指定类型的控制器(这里是PI)。控制器的设计是为了在性能(响应时间)和鲁棒性(稳定裕度)之间取得平衡。PID调谐器用所设计的控制器显示系统的闭环阶跃响应。
提示
你也可以打开PID调谐器从MATLAB®桌面,应用程序选项卡。当你这样做的时候,使用the植物菜单PID调谐器以指定您的工厂模型。
检查基准跟踪上升时间和稳定时间。
右键单击图并选择
>上升时间在图上用蓝点标出上升时间。选择>沉淀时间以标记沉降时间。要查看带有数值的工具提示,请单击每个蓝点。
初始PI控制器设计的上升时间为2.35 s,稳定时间为10.7 s。这两个结果都比设计要求慢。
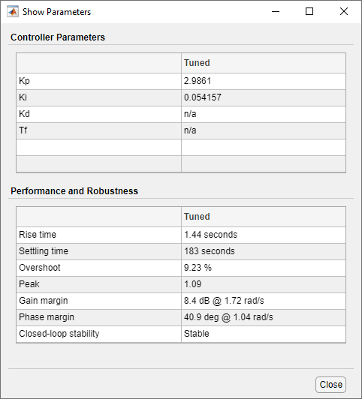
请注意
要在表格中显示性能指标,而不是在图上的工具提示中显示,请单击显示参数.此操作将打开一个显示,其中包含性能和健壮性指标以及调优后的控制器增益。
滑动响应时间滑块向右,尝试提高循环性能。响应图会根据新的设计自动更新。

移动响应时间滑块足够远,以满足小于1.5 s的上升时间要求,产生更大的振荡。此外,参数显示显示,新的响应具有不可接受的长稳定时间。
为了达到更快的响应速度,算法必须牺牲稳定性。
更改控制器类型以提高响应。
给控制器添加微分动作PID调谐器更自由的实现充分的相位裕度与期望的响应速度。
在类型菜单中,选择
PIDF.PID调谐器设计了一种新的pid控制器。(见PID控制器类型有关可用控制器类型的更多信息。)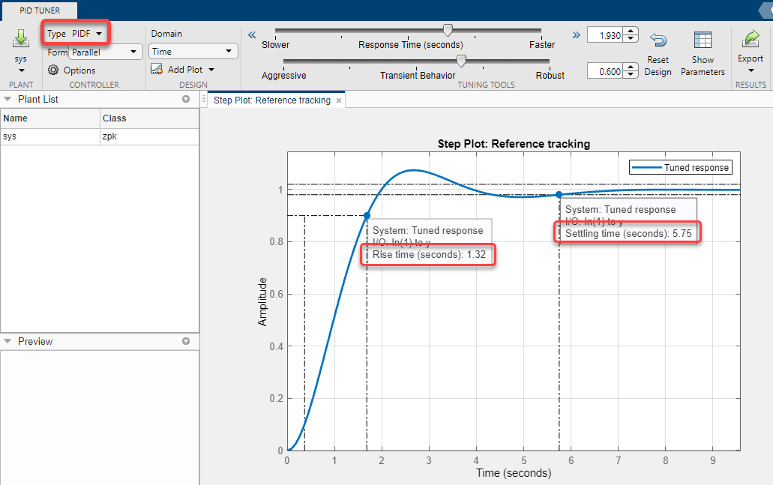
上升时间和沉降时间满足设计要求。你可以使用响应时间对滑块的响应做进一步的调整。要恢复到默认的自动调优结果,请单击重新设计.
请注意
要调整闭环带宽而不是响应时间,请选择
频域从设计模式菜单。带宽与响应时间成反比。分析其他系统响应,如果合适的话。
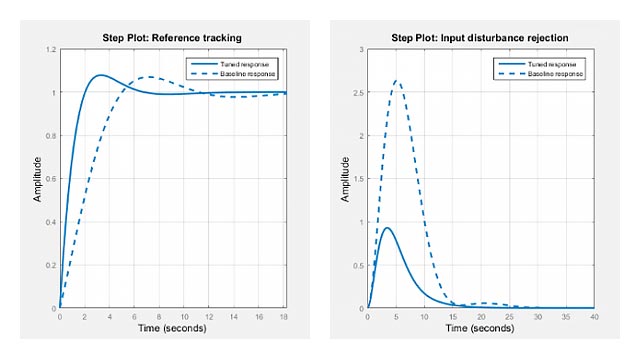
如需分析其他系统响应,请单击添加图.选择要分析的系统响应。
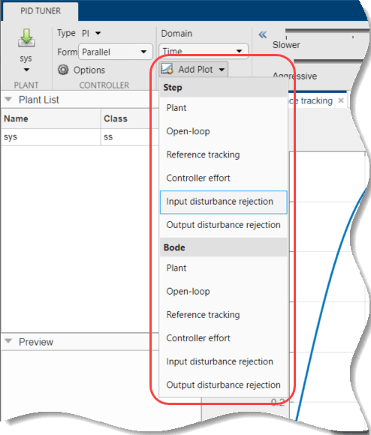
例如,要观察闭环阶跃响应对扰动在植物的输入,在一步部分的添加图菜单中,选择
输入干扰抑制.干扰抑制响应出现在一个新的图中。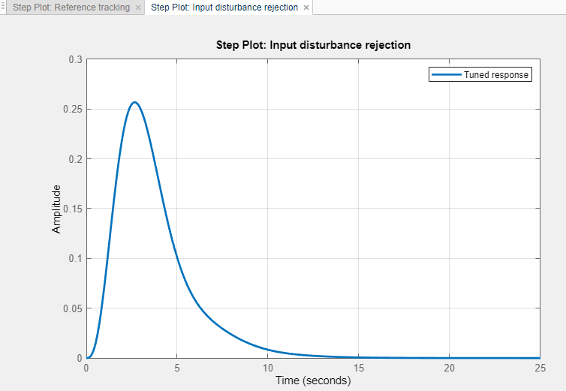
看到分析PID调谐器的设计有关可用响应图的更多信息。
提示
使用的选项视图TAB来改变PID调谐器显示多个情节。
将控制器设计导出到MATLAB工作区。
要将最终的控制器设计导出到MATLAB工作区,请单击
 出口.PID调谐器导出控制器为
出口.PID调谐器导出控制器为控件中的右键菜单也可以导出模型数据浏览器.要这样做,请单击数据浏览器选项卡。

然后,右键单击模型并选择出口.










相关的话题
你也可以从以下列表中选择一个网站: