优化二自由度PID控制器(命令行)
这个例子展示了如何设计一个两个自由度的二自由度PID控制器在命令行。例子还比较了二自由度控制器性能1-DOF PID控制器的性能。
二自由度PID控制器包括选点权重比例和微分项。1-DOF PID控制器相比,一个二自由度PID控制器可以实现更好的抗干扰性没有显著增加过度的选点跟踪。一个典型的控制体系结构使用一个二自由度PID控制器下图所示。
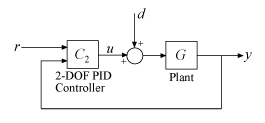
对于这个例子,设计一个二自由度控制器的工厂:
假设你的目标系统的带宽为1.5 rad / s。
wc = 1.5;特遣部队(G = 1, 0.5 - 0.1 [1]);C2 = pidtune (G,“PID2”wc)
C2 = 1 u = Kp (b * r y) + Ki - - - (r y) + Kd * (c * r y)年代Kp = 1.26, Ki = 0.255, Kd = 1.38, b = 0.665, c = 0连续时间二自由度PID控制器并联形式。
使用类型“PID2”原因pidtune生成一个二自由度控制器,表示为pid2对象。显示证实了这个结果。pidtune曲调所有控制器系数,包括选点权重b和c,平衡性能和鲁棒性。
计算闭环反应,请注意,一个二自由度PID控制器是2-input, 1输出的动态系统。你可以解决控制器分成两个渠道,一个参考信号和一个反馈信号,如图表所示。(见连续时间二自由度PID控制器表示为更多的信息。)

控制器分解为组件Cr和Cy,使用它们来计算闭环反应r来y。
C2tf =特遣部队(C2);Cr = C2tf (1);Cy = C2tf (2);T2 = Cr *反馈(G, Cy, + 1);
检查抗干扰性能,计算的传递函数d来y。
S2 =反馈(G, Cy, + 1);
相比较而言,设计一个1-DOF PID控制器相同的带宽和计算相应的传递函数。然后比较一步反应。
C1 = pidtune (G,“PID”、wc);T1 =反馈(G * C1, 1);S1 =反馈(G, C1);次要情节(2,1,1)stepplot (T1, T2)标题(“参考跟踪”次要情节(2,1,2)stepplot (S1, S2)标题(“抗干扰”)传说(“1-DOF”,二自由度的)

情节表明,添加第二个自由度消除reference-tracking反应没有任何成本的过度干扰排斥。你也可以提高抗干扰性使用DesignFocus选择。这个选项会导致pidtune在选点跟踪支持抗干扰性。
选择= pidtuneOptions (“DesignFocus”,“抗干扰”);C2dr = pidtune (G,“PID2”、wc、选择)
C2dr = 1 u = Kp (b * r y) + Ki - - - (r y) + Kd * (c * r y)年代Kp = 1.72, Ki = 0.593, Kd = 1.25, b = 0, c = 0连续时间二自由度PID控制器并联形式。
用默认的平衡设计重点,pidtune选择一个b值在0和1之间。这种植物,当你改变设计重点支持抗干扰性,pidtune集b= 0和c= 0。因此,pidtune自动生成一个I-PD控制器优化的抗干扰性。(显式地指定一个I-PD控制器没有设置设计关注收益率类似的控制器)。
比较使用所有三个控制器闭环反应。
C2dr_tf =特遣部队(C2dr);Cdr_r = C2dr_tf (1);Cdr_y = C2dr_tf (2);T2dr = Cdr_r *反馈(G, Cdr_y, + 1);S2dr =反馈(G, Cdr_y, + 1);次要情节(2,1,1)stepplot (T1, T2, T2dr)标题(“参考跟踪”次要情节(2,1,2)stepplot (S1, S2, S2dr);标题(“抗干扰”)传说(“1-DOF”,二自由度的,“双自由度拒绝焦点”)
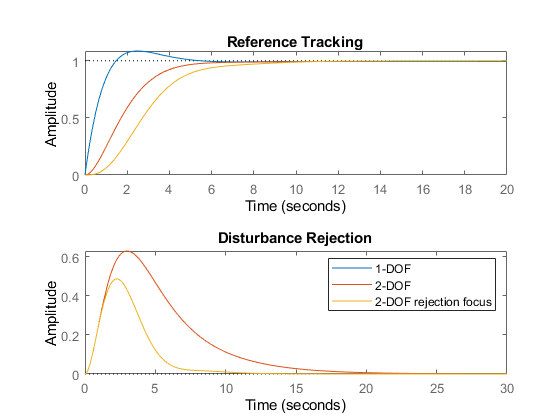
故事情节表明,抗干扰性进一步加强与平衡的二自由度控制器。这有一些牺牲reference-tracking性能提高,就是稍微慢一些。然而,reference-tracking反应仍然没有过度。
因此,使用双自由度控制可以提高抗干扰性前提下尽可能多的参考跟踪性能1-DOF控制。这些影响对系统性能强烈依赖于植物的属性。一些植物和控制带宽,使用双自由度控制或改变设计重点少或没有影响调整的结果。