车道保持辅助系统使用模型预测控制
这个例子展示了如何使用车道保持辅助系统在仿真软件®和演示万博1manbetx了这个块的控制目标和约束。
车道保持辅助系统
车辆(自我车)配有lane-keeping协助(党的)系统有一个传感器,照相机等措施中心线之间的横向偏差和相对偏航角巷和自我的车。传感器也措施当前车道曲率和曲率的导数。根据曲线长度传感器可以查看,前面的曲率自我车可以从当前的曲率和曲率计算导数。
党的系统保持自我的汽车旅行沿着中心线的车道的道路上通过调整自我的汽车前面的转向角。车道保持控制的目标是驱动横向偏差和相对偏航角接近于零。

万博1manbetx为自我汽车仿真软件模型
自我汽车的动力学建模仿真软件。万博1manbetx打开仿真软件模型。万博1manbetx
mdl =“mpcLKAsystem”;open_system (mdl)

定义样本的时间,Ts仿真时间,T,在几秒钟内。
t = 0.1;T = 15;
描述车辆横向动力学,本例中使用自行车模型用以下参数。
米车辆总质量(公斤)。工业区是汽车的偏航惯性矩(公斤* m ^ 2)。低频是纵向重心距离前面轮胎(m)。lr是纵向重心距离后方轮胎(m)。Cf是前轮胎的侧偏刚度(N / rad)。Cr后轮胎的侧偏刚度(N / rad)。
m = 1575;工业区= 2875;如果= 1.2;lr = 1.6;Cf = 19000;Cr = 33000;
你可以使用一个线性定常代表车辆横向动力学(LTI)系统用以下状态,输入和输出变量。状态变量的初始条件是假定为零。
状态变量:横向速度
 和偏航角速率
和偏航角速率
输入变量:前面的转向角

输出变量:状态变量一样



在这个例子中,纵向车辆动力学与车辆横向动力学分离。因此,纵向速度是假定为常数。在实践中,纵向速度可能会有所不同。车道保持辅助系统块使用货币政策委员会自适应调整相应的横向动力学模型。
%指定纵向速度米/秒。Vx = 15;
指定一个,状态空间模型G (s)的车辆横向动力学。
= [(2 * Cf + 2 * Cr) / m / Vx, Vx - (2 * Cf * lf-2 * Cr * lr) / m / Vx;…- (2 * Cf * lf-2 * Cr * lr) /工业区/ Vx - (2 * Cf *低频^ 2 + 2 * Cr * lr ^ 2) /工业区/ Vx);B = [2 * Cf / m, 2 * Cf *低频/工业区)”;C =眼(2);G = ss (A, B, C, 0);
传感器动态和曲率Previewer
在这个例子中,传感器动态块输出横向偏差和相对偏航角。相对偏航角的动态 ,在那里
,在那里 表示曲率。横向偏差的动态
表示曲率。横向偏差的动态 。
。
曲率Previewer块输出预览曲率与先行的一秒钟的时间。因此,给定一个样本 ,预测地平线
,预测地平线10步骤。这个示例中使用的曲率计算基于双车道改变机动轨迹。
指定预测地平线和获得预览曲率。
PredictionHorizon = 10;时间= 0:0.1:15;md = getCurvature (Vx、时间);
车道保持辅助系统的配置块
党的系统建模仿真软件使用车道保持辅助系统。万博1manbetx党的系统块的输入:
预览曲率(从车道检测)
自我纵向速度
横向偏差(从车道检测)
相对偏航角(从车道检测)
党的系统的输出是自我的前转向角的车。考虑到自我的物理限制汽车,转向角约束的范围[-0.5,0.5]rad / s。
u_min = -0.5;u_max = 0.5;
对于这个示例,车道保持辅助系统的默认参数块匹配仿真参数。如果你的仿真参数与默认值不同,相应地更新块参数。
仿真分析
运行模型。
sim (mdl)
假设没有干扰# 1添加到测量输出。- - >输出假设扰动添加到# 2集成白噪声测量输出。- - >”模型。噪音”是空的。假设白噪声在每个测量输出。
仿真结果。
mpcLKAplot (logsout)
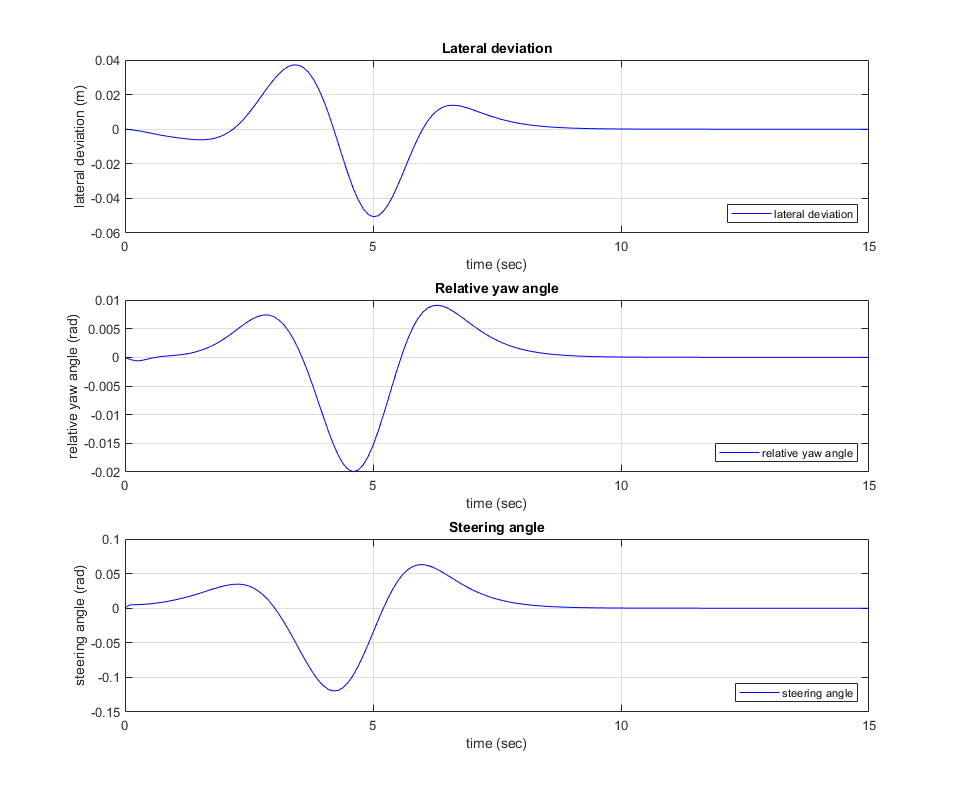
横向偏差和相对偏航角都收敛于零。即自我汽车遵循基于预览密切曲率的必经之路。
%关闭仿真软件模万博1manbetx型。bdclose (mdl)