探测器性能分析使用ROC曲线
这个例子展示了如何评估相干和非相干系统的性能使用接受者操作特征(ROC)曲线。示例假定探测器运行在一个添加剂复高斯白噪声环境。
ROC曲线通常是用来评估雷达和声纳探测器的性能。ROC曲线是块检测的概率的概率(Pd)和假警报(Pfa)对于一个给定的信噪比(信噪比)。
介绍
Pd说的概率是1是真的考虑到事件发生。Pfa的概率是说1是真的考虑到0事件发生。在声纳和雷达等应用程序,事件表明,存在一个目标,和0事件表明,目标不存在。
探测器的性能是衡量的能力达到一定的Pd和Pfa对于一个给定的信噪比。检查ROC曲线提供了洞察其性能。您可以使用rocsnr函数来计算和绘制ROC曲线。
单脉冲检测
给定一个信噪比的值,可以计算出Pd和Pfa值线性或平方律检测器可以实现使用一个单脉冲。设置Pd价值假设您有一个信噪比8分贝和需求决定价值Pfa值最多1%。您可以使用rocsnr函数计算Pd和Pfa值,然后确定Pd的值对应于Pfa = 0.01。注意,默认情况下rocsnr函数假设相干检测。
(Pd, Pfa) = rocsnr (8);idx =找到(Pfa = = 0.01);%寻找Pfa指数= 0.01
使用索引确定上面你可以找到Pd的值对应于Pfa = 0.01。
Pd (idx)
ans = 0.8899
的一个功能rocsnr信噪比的函数,您可以指定一个向量的价值观和ROC曲线的函数计算每一个信噪比的值。而不是单独计算Pd和Pfa值对于一个给定的信噪比,你可以查看结果的情节ROC曲线。的rocsnr功能块的ROC曲线在默认情况下如果没有指定的输出参数。调用rocsnr函数的输入向量四信噪比的值和输出参数产生的情节ROC曲线。
SNRvals = (2 4 8 9.4);rocsnr (SNRvals);
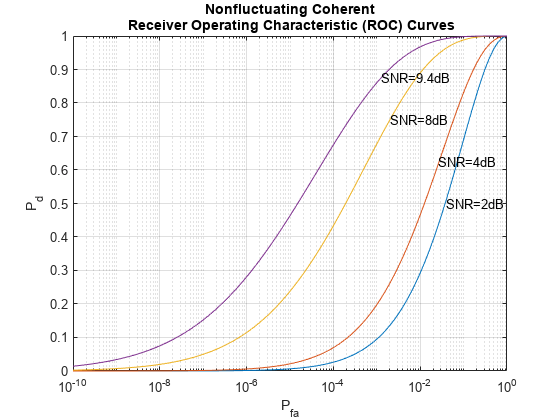
在情节中,选择工具栏中的数据光标按钮(或在工具菜单中),然后选择信噪比= 8分贝曲线的Pd = 0.9验证Pfa大约是0.01。
多脉冲检测
提高探测器性能的一个方法是平均几个脉冲。这是特别有用的情况下感兴趣的信号是已知的和发生在添加剂复杂的白噪声。尽管这仍然适用于线性和平方律检测器,平方律检测器的结果可能是大约0.2分贝。分析8分贝的性能通过假设一个信噪比和平均两个脉冲。
rocsnr (8,“NumPulses”2);
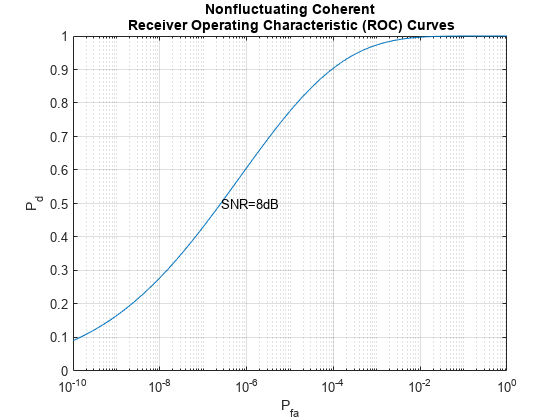
通过检查情节可以看出,平均在两脉冲导致更高的检测概率为给定的误警率。8分贝的信噪比和平均两个脉冲,可以限制最多假警报的概率是0.0001,实现检测的概率为0.9。回想一下,单脉冲,你必须允许假警报的概率高达1%达到相同的检测概率。
非相干检测器
至此,示例处理已知信号复杂的高斯白噪声。的rocsnr函数默认假设一个相干检测器。分析检测器的性能的情况下,信号是已知的,除了阶段,你可以指定一个非相干检测器。使用相同的信噪比的值,分析非相干检测器的性能。
rocsnr (SNRvals“SignalType”,“NonfluctuatingNoncoherent”);
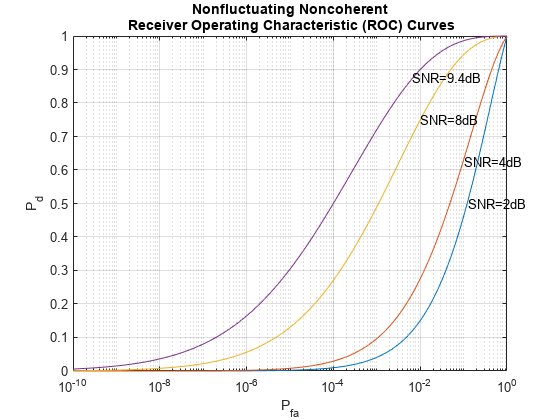
专注于ROC曲线对应的信噪比8分贝。通过检查的图像数据指针,你可以看到,实现检测的概率为0.9,你必须容忍0.05的虚警概率。不使用相位信息,您将需要更高的信噪比达到相同的给定Pfa Pd。对于非相干线性检测器,使用Albersheim方程来确定信噪比的价值将达到预期的Pd和Pfa。
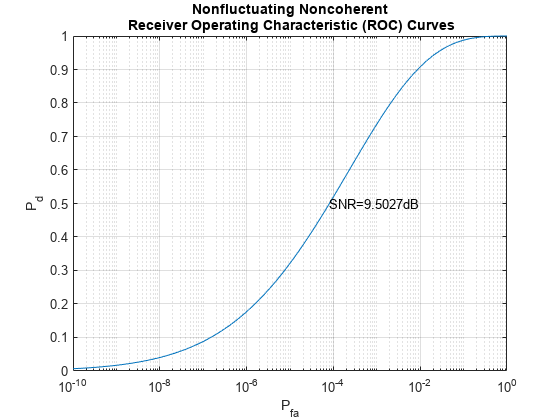
SNR_valdB = albersheim (0.9 . 01)% Pd = 0.9和Pfa = 0.01
SNR_valdB = 9.5027
绘制ROC曲线的SNR值近似Albersheim的方程,可以看到,探测器将实现Pd = 0.9和Pfa = 0.01。注意,Albersheim的技术只适用于非相干检测器。
rocsnr (SNR_valdB“SignalType”,“NonfluctuatingNoncoherent”);
波动的目标检测
所有上面的讨论中假设目标是nonfluctuating,这意味着目标的统计特性不随时间变化。然而,在现实场景中,目标可以加速和减速以及横滚和俯仰。这些因素导致目标的雷达截面(RCS)随时间变化。一组统计模型称为Swerling模型常用于描述目标RCS的随机变化。
有四个Swerling模型,即Swerling 1——4。nonfluctuating目标通常被称作Swerling 0或Swerling 5。每个Swerling模型描述了目标RCS的变化随时间变化的概率分布。
因为目标RCS变化,ROC曲线的波动nonfluctuating的目标是不一样的。此外,由于Swerling目标随机相添加到接收到的信号,很难用一个相干检测器Swerling目标。因此,非相干检测技术常用于Swerling目标。
现在比较ROC曲线nonfluctuating目标和Swerling 1的目标。特别是,您想要探索的信噪比要求的情况下如果你想达到同样的Pd和Pfa。对于这样一个比较,常常容易绘制ROC曲线与不同Pfa Pd对信噪比。我们可以使用rocpfa这种形式的函数绘制ROC曲线。
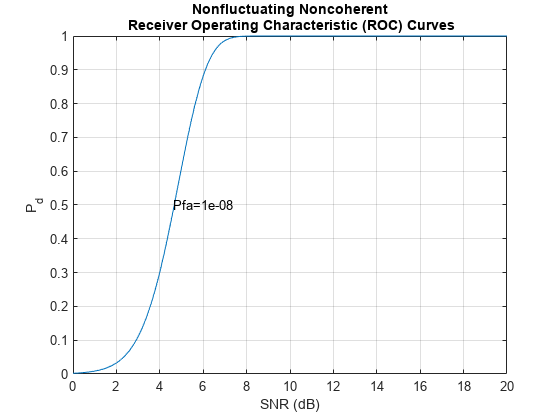
假设非相干检测与10综合脉冲与所需的Pfa e-8最多是1。首先,绘制ROC曲线nonfluctuating目标。
rocpfa (1 e-8“NumPulses”10“SignalType”,“NonfluctuatingNoncoherent”)
然后绘制ROC曲线1 Swerling目标比较。
rocpfa (1 e-8“NumPulses”10“SignalType”,“Swerling1”)
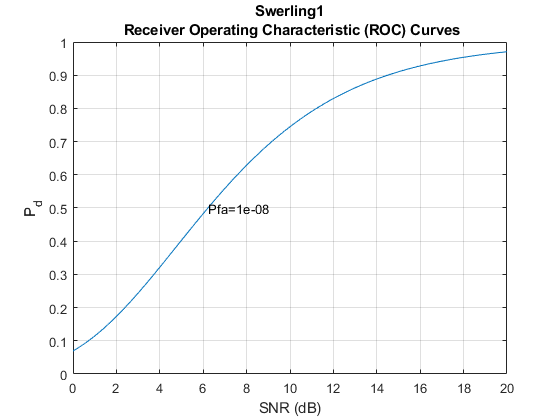
从这些数据可以看出,我们可以看到,Pd的0.9,您需要一个信噪比约为6 dB如果目标是nonfluctuating。但是,如果目标是Swerling案例1模型,所需的信噪比跳跃超过14 dB, 8分贝的区别。这将大大影响系统的设计。
作为在nonfluctuating目标的情况下,你有近似方程,以帮助确定所需的信噪比,而无需画上所有的曲线。方程用于目标是Shnidman波动方程。使用的场景绘制ROC曲线,信噪比可以使用的需求shnidman函数。
snr_sw1_db = shnidman (0.9 1 e-8 10,1)% Pd = 0.9, Pfa = 1 e-8, 10个脉冲,
snr_sw1_db = 14.7131
% Swerling案例1
计算信噪比的要求匹配的价值来源于曲线。
总结
ROC曲线分析探测器性能非常有用,对相干和非相干系统。这个例子使用了rocsnr函数来分析线性检测器的有效性不同信噪比的值。还回顾了提高探测器的性能通过平均多个样本。最后,这个例子展示了如何使用rocsnr和rocpfa函数来分析探测器性能在使用非相干检测器nonfluctuating和波动的目标。