雷达垂直覆盖地形
通过其运行的环境的存在来修改雷达系统的传播路径。当俯卧地,通过反射波修改自由空间辐射图案,这导致具有凸起和零的干涉图案。在Lobe最大值中,雷达返回可以增加多达12dB,而在最小返回的情况下可以理论上转到0。
垂直覆盖图案是检测轮廓。它可以通过自由空间范围所指定的恒定信号电平进行雷达系统的性能。垂直覆盖物考虑了直接和地反射光线之间的干扰,以及折射。此示例将在存在重杂波的情况下定义L波段雷达系统,并将向您展示如何在地形上可视化其三维垂直覆盖范围。
定义雷达
要启动,请指定具有以下参数的L波段监视雷达:
峰值功率:3kw
工作频率:1ghz
传输和接收天线波束宽度:20度在方位角和高度中
脉冲宽度:2 μs
%雷达参数rfs = 50e3;%自由空间范围(m)rdrppower = 3 e3;%峰值功率(W)fc = 1 e9;%工作频率(Hz)hpbw = 20;半功率波束宽度(deg)RDRPULSEW = 2E-6;%脉冲宽度tiltAng = 1;%雷达倾角(仰角)azRotation = 80;%雷达方位旋转角(deg)垂直覆盖参数Minel = 0;最小垂直覆盖角(deg)maxEl = 90;最大垂直覆盖角(deg)Elstepsize = 1;%上升步长(deg)azAng = 60:2:60;%仰角切角(deg)
将传输天线的半功率波束宽度(HPBW)值转换为使用BeamWidth2gain.函数。假设一个余弦矩形孔径,这是一个很好的近似真实天线。
rdrgain = beamwidth2gain (hpbw,“CosineRectangular”);发射和接收天线增益(dBi)
定义的位置
下一节定义雷达位置。雷达安装在离地面100米的高塔上。雷达高度是地面高度和雷达塔高度参照平均海平面(MSL)的总和。使用以下方法可视化位置geoplot3。雷达将在下面的图像右上角以红色圆形点的形式出现。
%雷达位置rdrlat = 39.5;%雷达纬度rdrlon = -105.5;雷达经度(度)rdrtowerht = 100;天线高度(m)surfaceHtAtRadar = 2812;%雷达位置地面高度(m)rdralt = surfaceHtAtRadar + rdrtowerht;%雷达高度(m)%从美国地质导入相关地形数据%勘探局dtedfile =“n39_w106_3arc_v2.dt1”;归因='SRTM 3秒第二分辨率。可从美国地质调查中获得的数据。;(Z, R) = readgeoraster (dtedfile,“OutputType”,“双”);%使用地理球体图可视化位置包括地形addCustomTerrain (“southboulder”,dtedfile,“归因”、归因);hTerrain = uifigure;g = geoglobe (hTerrain,“地形”,“southboulder”,“技术”,'街道');(g,“上”) h_rdrtraj = geoplot3(g,rdrlat,rdrlon,rdralt,“o”,'颜色',[0.6350 0.0780 0.1840],'行宽'6“MarkerSize”6);坎波斯(g, 40.0194565714502, -105.564712896622, 13117.1497971643);camheading (150.8665488888147 g);campitch (-16.023558618352187 g);

调查自由空间范围
对于此示例,可用空间范围rfs为目标具有指定信噪比(SNR)的距离。假设一个大目标具有10 dBsm雷达截面(RCS)。在此范围内,自由空间目标信噪比可计算为:
TRC = DB2Pow(10);%RCS(M ^ 2)lambda = freq2wavelen(fc);%波长(m)tsnr = radareqsnr(λ,rfs、rdrppower rdrpulsew,...RCS的曾经,“获得”rdrgain)
TSNR = -0.7449.
对于我们的监视雷达,期望的性能指标是探测概率(Pd)为0.8,虚警概率(Pfa)低于1e-3。为了使雷达系统设计更加可行,我们可以使用脉冲积分技术来降低所需的信噪比。对于这个系统,我们假设64个脉冲的非相干积分。在指定的Pd和Pfa处检测所需的最小信噪比的良好近似可以通过检测能力函数如下。注意,空闲空间信噪比满足检测要求。
pd = 0.8;PFA = 1E-3;MinSNR =可检测性(PD,PFA,64);isdetectable = tsnr> = minsnr
isdetectable =逻辑1
的toccgh函数允许将接收方检测概率转换为轨迹概率。假设默认跟踪器,所需的Pd和Pfa转换为以下目标跟踪概率(Pdt)和假跟踪概率(Pft)。
[PDT,PFT] = TOCCGH(PD,PFA)
Pdt = 0.9608
击球= 1.0405 e-06
Pd和Pfa要求的跟踪概率约为96%,虚假跟踪概率约为1e-6。
绘制垂直覆盖范围
垂直覆盖模式使用布莱克图(也称为距离-高度-角度图)进行可视化。沿着x- 轴是传播的范围和高度y-axis是相对于光线的起源。
垂直覆盖轮廓用Radarvcd.函数。中默认的介电常数模型Radarvcd.是基于Blake的“雷达垂直平面覆盖图的机器绘图”中的海洋介电常数模型。该模型不适用于已定义的场景,即在陆地上。因此,要模拟更真实的传播,第一步是选择一个更合适的介电常数。使用earthSurfacePermittivity功能与植被标志。假设环境温度为21.1摄氏度,也就是大约70华氏度。假设重量含水量为0.3。
temp = 21.1;%环境温度(摄氏度)gwc = 0.3;重量含水量[~, ~, epsc] = earthSurfacePermittivity (“植物”、fc、临时gwc);
接下来,指定天线。模拟天线作为理论sinc天线模式和绘图。
hBeam =分阶段。SincAntennaElement ('beamwidth', hpbw);模式(hBeam、fc);

在0度方位角获得高度模式。
elang = -90:0.01:90;Pat = GetVoltagePattern(HBeam,Fc,0,elang);
指定大气并计算相应的有效地球半径。由于本例中雷达的纬度为39.5度,中纬度大气模式将是最合适的。假设这段时间在夏季。
使用中纬度大气模型设置有效的地球半径%在夏天[nidx,N] = refactiveidx ([0 1e3],...“LatitudeModel”,“中期”,“季节”,“夏天”);RGradient = (nidx(2) - nidx(1))/1e3;Re = effearthradius (RGradient);%M.
接下来,使用。计算垂直覆盖模式Radarvcd.函数。
[vcpkm, vcpang] = radarvcd (rdrtowerht fc, rfs。* 1 e - 3,...“SurfaceRelativePermittivity”epsc,...“SurfaceHeightStandardDeviation”30岁的...'植被',“树”,...“AntennaPattern”帕特,“PatternAngles”elAng,...“TiltAngle”tiltAng,...“EffectiveEarthRadius”再保险,...'minelevation'minEl,...“ElevationStepSize”,elstepsize,...'maxelevation', maxEl);
利用场地的表面高度来获得表面的折射率refractiveidx。
%计算一个合适的曲面[〜,ns] = refractidx(surfacehtatradar,“LatitudeModel”,“中期”,“季节”,“夏天”);
使用垂直覆盖绘制blakechart函数。的blakechart轴是利用中央无线电传播实验室(CRPL)参考大气形成的。CRPL模型被广泛使用,它近似于折射率随高度的指数衰减,这已被证明是正常大气(即不像管道那样经历异常传播的大气)的一个极好的近似。CRPL模型是通过将表面高度折射率和折射率指数设置为适合系统运行位置和一年中的时间的值来定制的。
更新函数调用中的表面折射率和折射指数输入。在随后的曲线中,轮廓的恒定信号级由先前计算的目标SNR给出。
rexp = refractionexp (Ns);blakechart (vcpkm vcpang,“ScalePower”,1,“SurfaceRefractivity”,ns,“RefractionExponent”rexp)

可视化地形上的3-D垂直覆盖范围
下一节以指定的方位角间隔计算垂直覆盖范围。使用垂直覆盖范围和角度使用range2height函数使用“CRPL”方法。然后将距离-高度-角度值转换为笛卡尔坐标。
%初始化笛卡儿X, Y, Z输出numaz = numel(azang);numrows = numel(minel:elstepsize:maxel)+1;vcpx = zeros(numrows,numaz);vcpy = zeros(numrows,numaz);vcpz = zeros(numrows,numaz);WGS84 = WGS84ELLIPSOID;%在笛卡尔坐标中获得垂直覆盖轮廓为idx = 1: numAz得到这个方位的仰角图帕特= getVoltagePattern (hBeam、fc azAng (idx) elAng);获取地形高度信息[xdir, ydir zdir] = sph2cart(函数(azAng (idx) + azRotation), 0, 1 e3);[xlat, ylon zlon] = enu2geodetic (xdir、ydir zdir, rdrlat, rdrlon, rdralt, wgs84);[~, ~, ~, htsurf] = los2 (Z, R, rdrlat rdrlon,...xlat、ylon rdralt zlon,“火星科学实验室”,“火星科学实验室”);htstdsurf = std(htsurf(〜isnan(htsurf)));%计算垂直覆盖范围[vcp, vcpang] = radarvcd (fc、rfs rdrtowerht,...'范围顺序',“米”,...'宽度',“米”,...“SurfaceRelativePermittivity”epsc,...“SurfaceHeightStandardDeviation”,htstdsurf,...'植被',“树”,...“AntennaPattern”帕特,“PatternAngles”elAng,...“TiltAngle”tiltAng,...“EffectiveEarthRadius”再保险,...'minelevation',1,...“ElevationStepSize”,1,...'maxelevation', 90);%计算相关的高度vcpht = range2height (vcp rdrtowerht vcpang,...“方法”,“CRPL”,“MaxNumIterations”2,“宽容”1飞行,...“SurfaceRefractivity”,ns,“RefractionExponent”, rexp);%计算真正的倾斜范围和仰角到目标[~, vcpgeomrt vcpelt] =...height2range (vcpht rdrtowerht vcpang,...“方法”,“CRPL”,...“SurfaceRefractivity”,ns,“RefractionExponent”, rexp);%设置此迭代的值vcpelt = [0; vcpelt (:); vcpang(结束)];vcpgeomrt = [0; vcpgeomrt (:); 0];%km.%转换范围,角度,高度到笛卡尔x,y,z[vcpX: idx) vcpY (:, idx) vcpZ (:, idx)] = sph2cart (...Deg2rad(Azang(Idx)。*那些(numrows,1)+ zzrootation),...函数(vcpelt) vcpgeomrt);结束
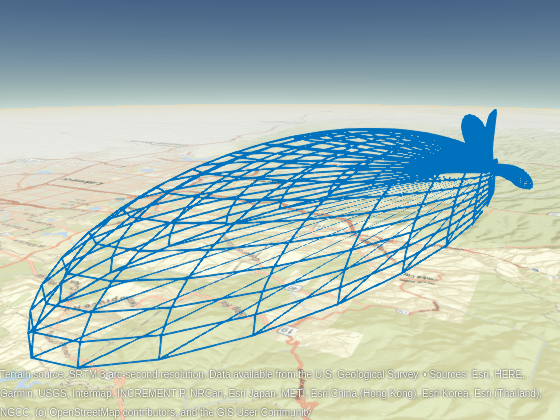
将笛卡儿垂直覆盖值转换为大地测量值并在地球上绘图。三维垂直覆盖将以蓝色网格的形式出现。
[vcpLat, vcpLon vcpAlt] = enu2geodetic (vcpX、vcpY vcpZ, rdrlat, rdrlon, rdralt, wgs84);[xMesh, yMesh zMesh] = helperCreateMesh (vcpLat, vcpLon vcpAlt);geoplot3 (g, xMesh yMesh zMesh,'行宽',1,'颜色',[0 0.4470 0.7410]);
总结
该示例讨论了计算三维垂直覆盖的方法,讨论将分析定制到局部大气条件的方法。考虑到从表面反射和折射的干扰,可视化创建的可视化对雷达系统的垂直性能进行了洞察力。
参考文献
巴顿,大卫克。现代雷达的雷达方程。诺伍德,马萨诸塞州:Artech House, 2013。
布莱克,拉蒙特V。无线电射线(雷达)距离-高度-角度图海军研究实验室,NRL报告6650,1968年1月22日。
Blake,Lamont V.“连续非线性大气折射率剖面的射线高度计算。”无线电科学,第3卷(新系列),第1期,1968年1月,第85-92页。
Bean, B. R.和G. D. Thayer。指数参考大气。华盛顿特区:美国政府印刷局,1959年。
%通过关闭地理球体并移除导入的进行清理%地形数据。如果isvalid (hTerrain)关闭(hTerrain)结束removecustomterrain(“southboulder”)
函数帕特= getVoltagePattern (hBeam fc、azAng elAng)%从天线元件获得电压图案numaz = numel(azang);numel = numel(elang);Pat = Zeros(Numaz,Numel);为Ia = 1:Numaz为ie = 1:numEl pat(ia,ie) = step(hBeam,fc,[azAng(ia);elAng(ie)]);结束结束结束函数[xMesh, yMesh zMesh] = helperCreateMesh (x, y, z)%组织网格的输入,可以使用geoplot3绘制numpts = numel(x);xmesh =零(2 * numpts,1);Ymesh =零(2 * Numpts,1);zmesh =零(2 * numpts,1);[nrows,ncols] =尺寸(x);idxstart = 1;idxend = nrows;为II = 1:NCLS如果mod(ii,2)== 0 xmesh(idxstart:idxend)= x(:,ii);Ymesh(idxstart:idxend)= y(:,ii);zmesh(idxstart:idxend)= z(:,ii);其他的xMesh (idxStart: idxEnd) = flipud (x (:, ii));yMesh (idxStart: idxEnd) = flipud (y (:, ii));zMesh (idxStart: idxEnd) = flipud (z (:, ii));结束idxStart = idxEnd + 1;如果ii ~= ncols idxEnd = idxStart + nrows -1;其他的idxEnd = idxStart + ncols -1;结束结束为2 = 1: nrows如果mod(ii,2)== 0 xmesh(idxstart:idxend)= x(ii,:);Ymesh(idxstart:idxend)= y(ii,:);zmesh(idxstart:idxend)= z(ii,:);其他的xMesh (idxStart: idxEnd) = fliplr (x (ii):));yMesh (idxStart: idxEnd) = fliplr (y (ii):));zMesh (idxStart: idxEnd) = fliplr (z (ii):));结束idxStart = idxEnd + 1;idxEnd = idxStart + ncols -1;结束结束
另请参阅
blakechart|检测能力|effearthradius|高度|radareqsnr|Radarvcd.|range2height|refractiveidx|toccgh
相关的话题
你也可以从以下列表中选择一个网站: