实时调整PID控制器使用开环PID自动调谐块
这个例子展示了如何使用开环PID自动调谐块为发动机转速调整PI控制器仿真和实时控制系统。
开环PID自动调谐块
开环PID自动调谐块可以实时调整单回路PID控制器。它执行一个开环实验,注入扰动信号基于植物的植物和计算PID增益频率响应估计接近所需的带宽。
开环PID自动调谐块支持两种典型PID优化场景实时应用程序。万博1manbetx
硬件上部署块并使用它在一个独立的实时应用程序不存在模型®。万博1manbetx
硬件上部署块但监视和管理实时优化过程在仿真软件中,使用外部模式。万博1manbetx外部模式允许之间的通信仿真软件运行在主机上的框图和硬件上运行生成的代码。万博1manbetx
这个例子集中在第二个场景中,开环PID自动调谐块用于调整发动机转速控制系统实时使用外部模式。
发动机转速的模型
仿真软件万博1manbetx模型包含一个PID块,一个开环PID自动调谐块,一个引擎模型。
mdl =“scdspeedctrlOnlinePIDTuning”;open_system (mdl)
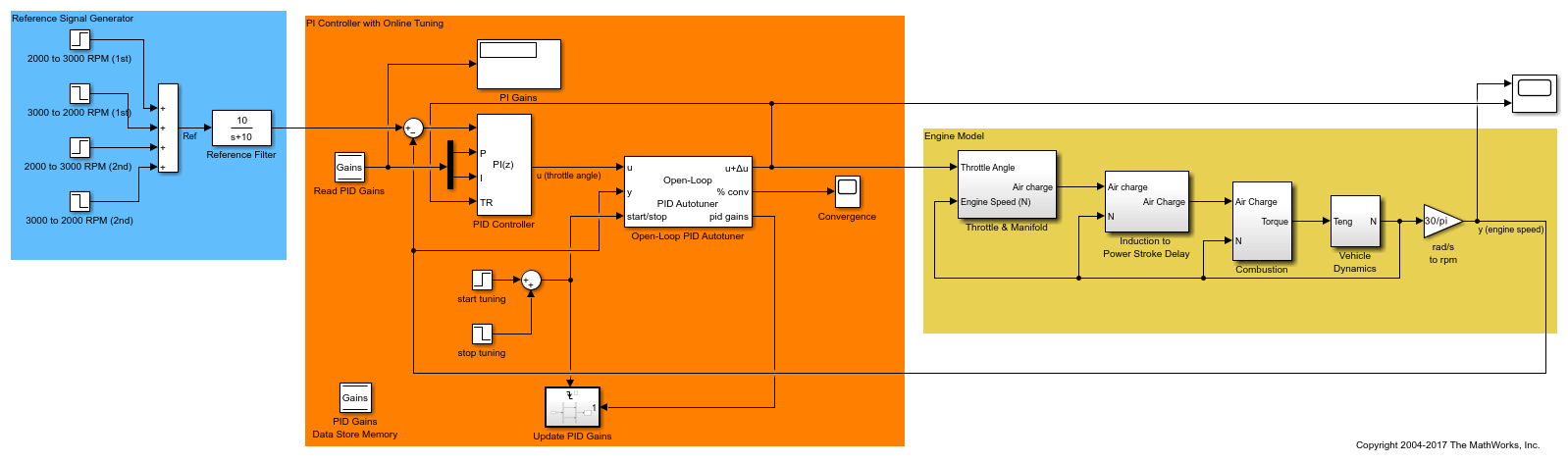
PI控制器的初始收益P = 0.01 = 0.01,提供外部PID块通过“P”和“我”港口。有外部P和我获得允许你改变后的新收益计算的开环PID自动调谐块。
开环PID自动调谐块之间插入PID块和引擎模型。启动/停止信号用于启动和停止一个开环实验。当没有运行实验,开环PID自动调谐块像一个单位增益的块,在“u”信号直接通过“u +Δu”。当实验结束时,块曲调PID增益和输出他们的PID增益”端口。
有几个重要的因素当使用开环PID自动调谐块实时物理设施。
工厂必须渐近稳定,因为一个开环实验中进行调优的过程。如果你的植物有一个积分器,你仍然可以通过选择不使用块估计植物直流增益。然而,在这两种情况下,你必须密切关注工厂的行为在优化过程和及时干预如果工厂太接近一个不良的操作条件。
帮助估计工厂实时频率响应更准确地说,应该有最低负载扰动在调优过程中发生。块期望植物输出响应注入扰动信号,和负载扰动扭曲了这个输出。
“跟踪模式”(TR尺寸)的PID块,使PID块跟踪真正的植物在调优过程中输入“u +Δu”。这个功能应该被用来提供一个无扰转移回路时关闭,PID块简历控制优化过程完成后。
配置开环PID自动调谐块
正确连接后开环PID自动调谐块与植物模型和PID块,打开块对话框,指定优化和实验设置。
在调优选项卡中,有两个主要的优化设置。

目标带宽:决定你想让控制器响应速度。在本例中,选择2 rad /秒,因为所需的上升时间是1秒。
目标阶段保证金:决定了健壮的你想要控制器。在本例中,选择默认值60度,过度导致约5%。
在实验选项卡中,有两个主要的实验设置。

正弦振幅:指定注射正弦波的振幅。在本例中,选择0.1所有四个正弦波,标称输入9的一小部分。在优化过程中,植物的输出变化之间的1900和2100 rpm,大概是+ / - 5%的名义工厂2000的输出。目标是保持名义操作点附近的工厂操作,避免激动人心的非线性行为。
一步振幅:指定的振幅信号注入的一步。在本例中,选择0.1。如果工厂有一个积分器,你不能估算直流增益。在这种情况下,清除估计信号直流增益与步骤参数。因此,没有一步信号注入核电站。
在正常模式模拟开环PID自动调谐块
如果你有一个植物模型在仿真软件,建议模拟开环PID自动调谐块对植物模型万博1manbetx在正常模式使用外部模式中的块实时调优。模拟信号连接和块设置可帮助您识别问题,这样你可以调整它们在生成代码。
sim (mdl);
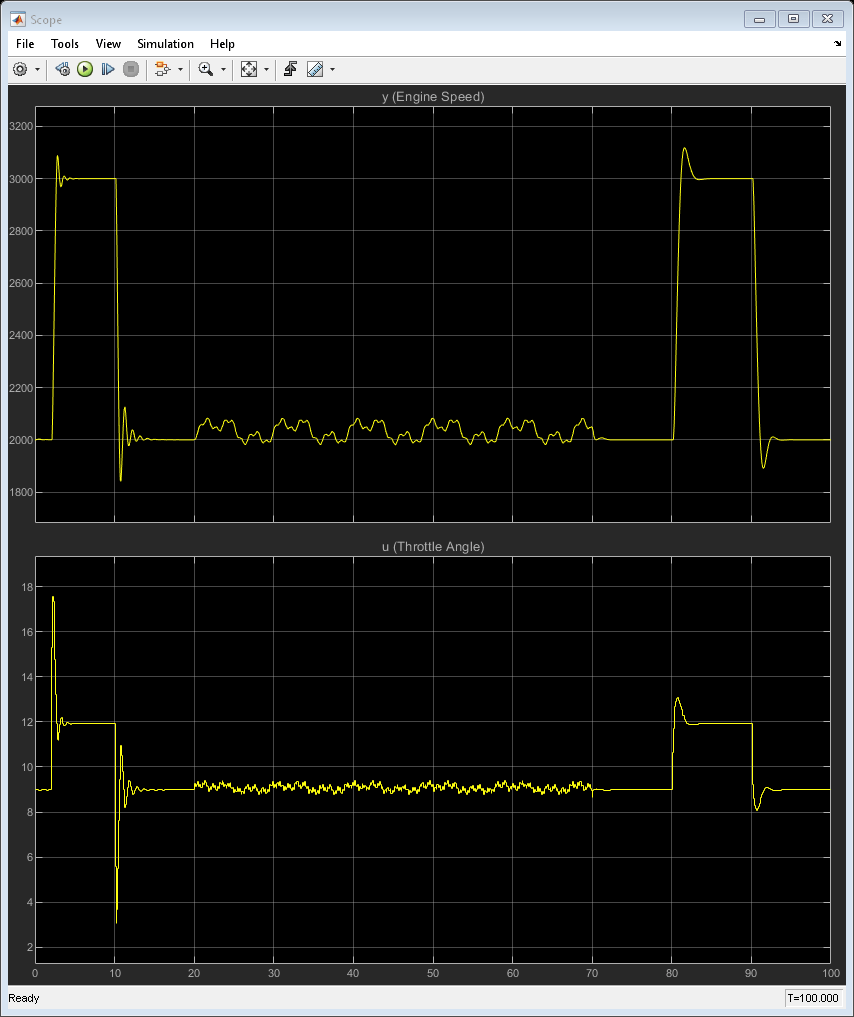
在这个例子中,发动机转速参考信号从2000到3000转,然后再回到2000 rpm的20秒。最初的成果我和P = 0.01 = 0.01造成强烈的振荡瞬态,必须退还。
在20秒,核电站运行在2000 rpm的名义操作点和在线PID调优的开始。实验持续时间是50秒,因为一个保守的指导方针表明大约需要100 /秒带宽网络的频率响应估计收敛。
当PID调优停在70秒,新的收益我和P = 0.0026 = 0.0065在“PID增益”立即外港和发送到外部P和我港PID,覆盖原来的收益。几乎没有撞在瞬态循环关闭,PID控制块的简历。
发动机转速参考信号从2000到3000 rpm,然后回到2000转80至100秒。新的π收益提供了一个更好的闭环响应。
在外部使用开环PID自动调谐块模式
调整PI控制器对物理引擎外部模式,你更换引擎模型部分的仿真软件模型与硬件接口模块提供转速测量的“y”和节气门角发送给执行机构作为“u”。万博1manbetx
作为一个例子,下面的图模型配置为优化外部模式,假设你的PI万博1manbetx控制器上运行一个Arduino®由于董事会和与你沟通通过串行端口的物理引擎。

原始模型在外部模式下工作,以下(为了)更改了原始模型模式。万博1manbetx
有一个主机运行仿真软件和通信Arduino由于董事会通过USB万博1manbetx连接。
仿真软件安装包A万博1manbet万博1manbetxxrduino硬件软件的支持。你必须安装一个不同的硬件支持包如果你的硬件是不同的。万博1manbetx
在配置参数对话框解算器窗格中,选择“固定的”解算器类型。在硬件实现窗格中,选择“Arduino由于“硬件板。
原始模型的发动机模型部分替换为两个串行接口模块。实时运行的开环PID自动调谐块Arduino董事会收集装置的输出串行接收块(传感器)和将实验信号发送到发动机使用串行传输块(执行机构)。
更灵活的实时操作,启动和停止翻转手工调优过程的“优化开关”,而不是基于模拟时钟。同样,更新π收益翻“增益开关”,改变参考信号通过抛“Ref开关”。
选择“外部模式”的Simulink仿真模型和仿真时间设置为“万博1manbetx无限”。
运行仿真。首先,整个模型万博1manbetx和仿真软件生成代码下载Arduino由于董事会。在程序开始运行后,您可以监视工厂实时输入和输出的范围。当植物达到2000 rpm的名义操作点,使用三个手动开关调整,更新和验证控制器。
减少内存和避免任务泛滥在外部模式
在块选项卡,减少内存和避免任务泛滥(外模式)选项可以帮助将生成的代码部署到硬件内存资源有限的或非常快的样品时间。
如果你的硬件有低内存,优化外部模式时使用此选项。模型只采用这一选项所生成的代码在线频万博1manbetx率响应估计功能。因为没有代码部署PID设计功能,结果是减少内存使用的硬件。在这种情况下,评估完成后,PID增益计算仿真软件的主机,然后发送回自动调谐块。万博1manbetx
PID增益计算调优过程结束时要求更比在线频率响应估计计算负载。如果控制器样品时间是非常快,一些硬件可能无法在执行周期内完成计算。因此,有主机进行PID增益计算还使您能够优化PID控制器与快速样品时间硬件计算能力有限。
bdclose (mdl)