导航的工具箱
Entwerfen,Simulieren und Bereitstellen von almorionen Zur Autonomen导航
模具导航工具箱™enthält算法和分析工具für Bewegungsplanung,模具同时位置估计和Kartierung (SLAM) sowie Die Trägheitsnavigation。我的工具箱是一个可以使用的工具,可以使用取样工具。麻省理工学院SLAM地图生成器应用程序的2D和3D-Kartendarstellungen erzeugen, kartenerzeuung interaktiv visualisieren和调试。Zudem bietet模具工具箱传感器模型和算法für模具位置估计。您现在的位置是:虫网>资源分类>行业论文>医学论文> Diese erlauben Ihnen die Simulation and Visualisierung von IMU-, GPS- and Rad-Encoder-Sensordaten sowie die Abstimmung von Fusionsfiltern für die Multisensor-Lagebestimmung。
我想您是来自法国自动化公司、机器人公司和Verbraucherelektronik的。您可以登录können Ihre navigation - algorithmen testen,并直接使用硬件(mit MATLAB Coder™oder Simulink Coder™)。万博1manbetx

Kartendarstellung
您可以在2D和3D中使用。Verwenden您hierfur多层地图嗯,generische Daten, wie ispielsweise Kosten, zu speichern。Mithilfe von kapselbasierten Kollisionsobjekten sassen sdrdem Hindernisse darstellen。

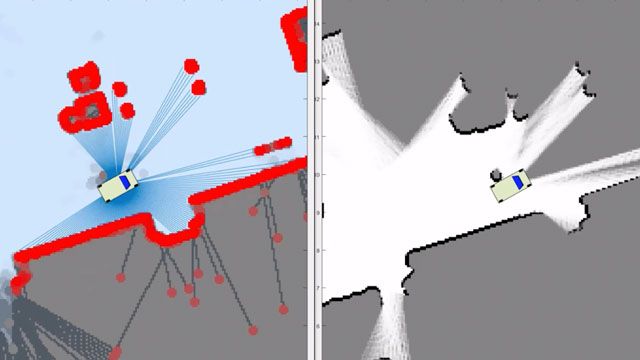
同步定位与绘图
实施者请您自己来Multi-Sensor-SLAM-lösungen米思福埃因·费恩尔雷斯蒂滕姿势图 - 擎天柱。Durch Die Verwendung Interaktiver WerkzeugeKönnenSiezudemLoop ClosuresÜberprüfenund Modifizieren。

Sensor-Modellierung
参数für verschiedene Sensoren wie ispielsweise IMU, GPS, GNSS, Rad-Encoder and Entfernungsmesser。Visualisieren Sie dabei Sensororientierung, Geschwindigkeit, Trajektorien und Messwerte。
在dynamischen Umgebungen导航
我希望您能住在国际铁路上,也希望您能住在德国。Zur Verfolgung geplanter Bahnen and Trajektorien dienen Regelungsalgorithmen。
Produktressourcen:
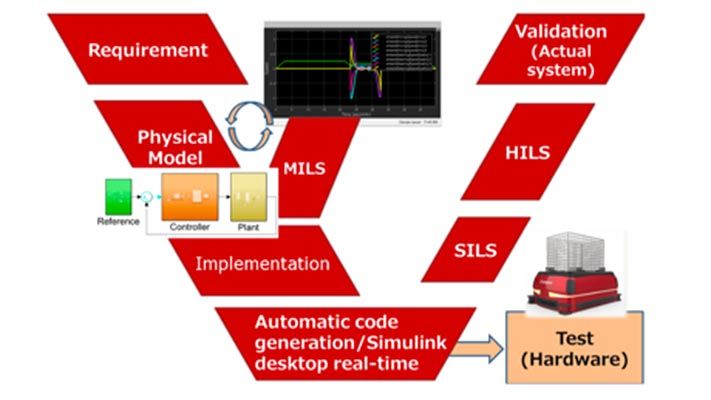
麻省理工学院的MATLAB和Si万博1manbetxmulink已经建立了运动控制器的原型和硬件模型。Durch Simulationen konnten wir den Algorithmus für die positionsestimmung prüfen and etwaige Probleme abklären。”
武藏半光实业有限公司


