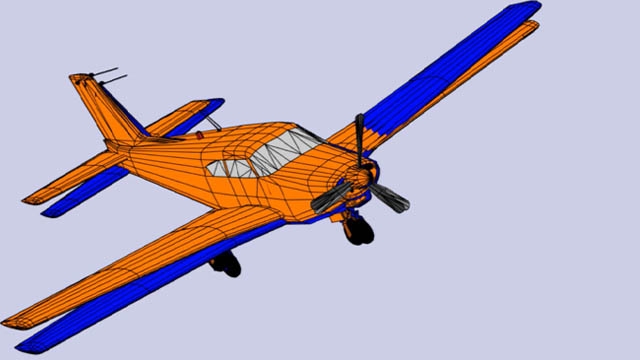
四元数是用于在机械,航空航天,计算机图形学,视觉处理,以及其他应用的计算旋转矢量。它们由四个元件组成:3延伸的通常已知的虚数和一个限定旋转的幅度。四元数通常表示为:
\ [Q = W + X \ mathbf {I} + Y \ mathbf {Ĵ} + Z \ mathbf {K} \四\文本{其中} \四\ mathbf {I} ^ 2 = \ mathbf {Ĵ} ^ 2= \ mathbf {K} ^ 2 = \ mathbf {I} \ {mathbfĴ} \ mathbf {K} = - 1 \]
这种旋转格式需要比旋转矩阵计算量小。
使用四元数的常见任务包括:
- 四元数,旋转矩阵,和方向余弦矩阵之间转换
- 表演四元数的数学,如规范逆和旋转
- 模拟预制六度,自由(6自由度)模型建立与四元数的数学
有关详细信息,请参阅MATLAB®和万博1manbetx®这使您可以使用四元数,而不涉及到数学的深刻理解。