机器人编程涉及编写计算机程序,使一个机器人感知环境,决策和执行的任务。例如,编程的接地机器人自主导航内部的建设需要以下传感器处理,定位和映射,路径规划和路径,执行器控制装置,以及其它任务。
机器人编程一般包括:
- 使机器人来感知通过使用计算机视觉和深学习算法为对象检测和运动估计环境
- 通过同步定位和映射(SLAM)、运动和路径规划的算法实现机器人自主
- 通过控制设计控制系统,机器人的行为,如模型预测控制,计算扭矩控制和路径跟踪
- 进行通信,并且与不同的嵌入式平台,如CPU,GPU,FPGA,微控制器和连接的传感器和致动器接口连接
当机器人编程开始,工程师经常开发机器人的预期行为的状态机图。此外,编程语言如C / C ++,Python的®,爪哇®和MATLAB®是用于算法开发,并作为ROS用于硬件抽象,低级别的设备控制,消息传递之间的过程,以及硬件配置等中间件。
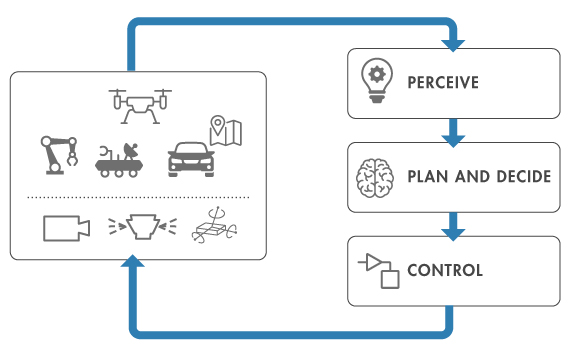
一个常见的机器人编程工作流程。
一步中的错误通常会影响整个机器人编程工作流程。建模和仿真通过在原型开发阶段而不是在生产阶段识别问题来帮助消除实现错误。模拟系统还可以帮助工程师通过调整控制参数来优化系统设计,而不必担心平台依赖性或访问机器人硬件。
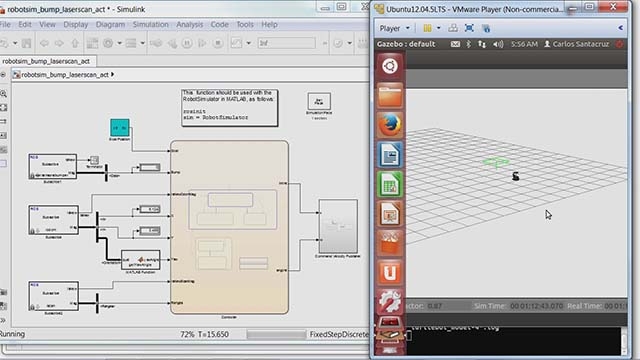
MATLAB提供了一些内置的算法和功能为机器人编程,和Simulink万博1manbetx®提供了建模和仿真基于模型的设计预先构建块。一旦期望的结果在模拟中获得的,独立的可从常用编程语言的仿真模型来生成所述嵌入式系统的可执行代码。万博1manbetx使用来自MATLAB和Simulink到ROS网络的连接,在C ++中RO万博1manbetxS节点可以直接从MATLAB和Simulink生成验证上启用ROS机器人和机器人仿真器,如凉亭应用。
有关详细信息,请参阅机器人系统工具箱™,导航工具箱™,ROS工具箱,MATLAB和万博1manbetx。