实施在嵌入式微处理器上运行的实用自适应巡航控制器可以提高控制性能。了解日立汽车系统如何使用Simulink万博1manbetx®和模型预测控制工具箱™:
- 利用模型预测控制技术设计了一种具有停停走走功能的自适应巡航控制器
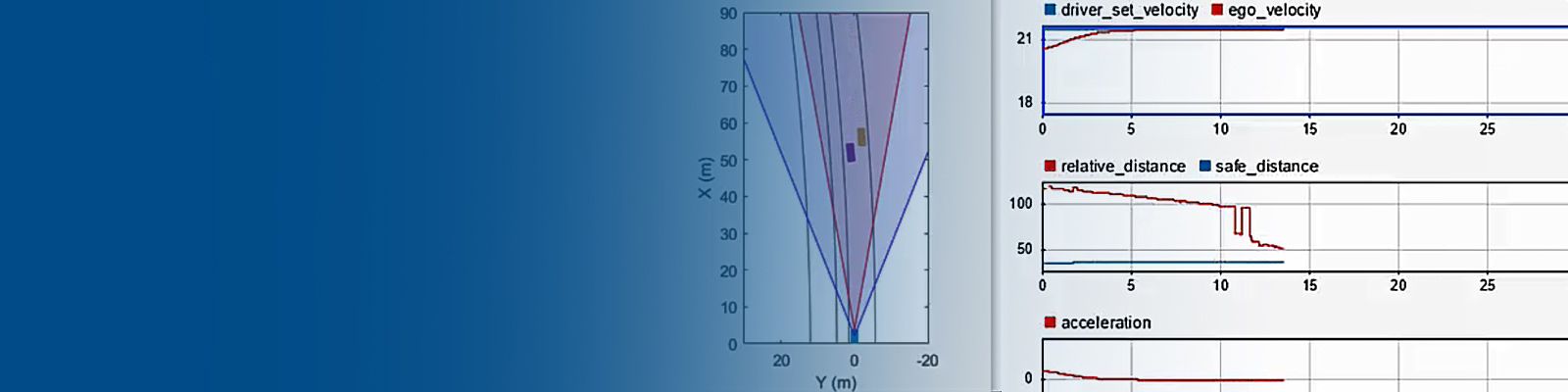
- 模拟各种驾驶场景来验证和验证控制器的性能
- 在嵌入式微处理器上实现控制器并在实验车辆中验证性能
万博1manbetxSimulink和Model Predictive Control Toolbox可以帮助您减少控制器开发时间,因为您使用仿真模型来设计和验证算法,并使用自动代码生成将其部署到硬件上。
本文是为JSAE组织的FAST-zero '17会议而开发并发表的。该论文发表在mathworks.com上,得到了JSAE的许可。