控制系统建模与模型对象
模型对象可以表示单个组件的控制架构,如植物、致动器、传感器、或控制器。你可以连接模型对象构建聚合模型方框图表示多个元素的结合反应。
例如,下面的控制系统包含一个预滤器F植物G和一个控制器C安排在一个单回路配置。传感器的模型还包含一个表示动态,年代。
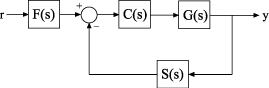
你可以代表每个组件作为一个模型对象。你不需要为每个组件使用相同类型的模型对象。例如,代表着植物Gzero-pole-gain (zpk)与双极模型年代= 1;C作为一个PID控制器F和年代作为传递函数:
G = zpk ([], [1], 1);C = pid (1.3, 0.3, 0.5);S =特遣部队(5 4 [1]);F =特遣部队([1]);
你可以把这些元素构建模型,代表你的控制系统或控制系统作为一个整体。例如,创建一个开环反应国网公司:
open_loop = S * G * C;
建立的模型过滤闭环反应,使用反馈命令:
T =反馈(G * C, S);
整个闭环系统响应模型r来y,结合T滤波器的传递函数:
试着= T * F;
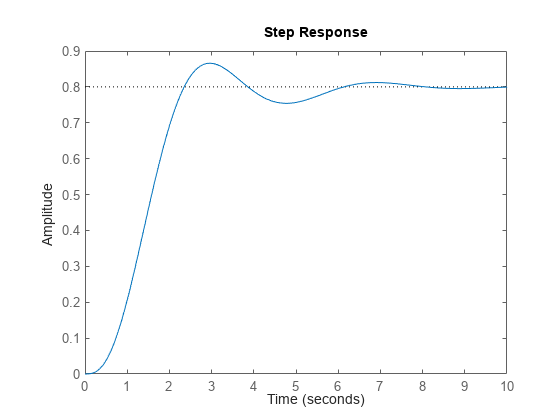
结果open_loop,T,试一试也线性模型对象。你可以操作与控制系统工具箱™控制设计与分析命令。例如,画出整个系统的阶跃响应:
stepplot(尝试)
当你把数字LTI模型,生成的数字LTI模型代表了总系统。由此产生的模型并不保留原始数据的组件。例如,T不单独跟踪的动态组件G,C,年代结合创建T。