模型IMU, GPS和INS / GPS
导航工具箱™使您能够模型惯性测量单元(IMU),全球定位系统(GPS)和惯性导航系统(INS)。您可以通过设置属性模型特定的硬件的模型从硬件数据值。您可以调整环境和噪声特性,模拟真实的环境。您可以使用这些模型来测试和验证融合算法或占位符,而开发大型应用程序。
本教程概述惯性传感器和GPS模型导航工具。

学习如何生成驱动传感器模型的真实运动,明白了waypointTrajectory和kinematicTrajectory。
惯性测量单元
一个IMU电子设备安装在一个平台。乌兹别克斯坦伊斯兰运动由单个传感器报告各种信息平台的运动。艾莫斯结合多个传感器,包括加速度计、陀螺仪和磁力计。
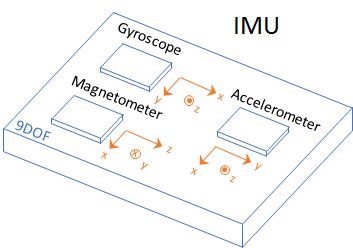
工具箱,测量从一个IMU模型使用以下单位和协调公约。
| 输出 | 描述 | 单位 | 坐标系统 |
|---|---|---|---|
| 加速度 | 当前加速度计读数 | 米/秒2 | 传感器的身体 |
| 角速度 | 当前陀螺仪阅读 | rad /秒 | 传感器的身体 |
| 磁场 | 当前磁强计读数 | μT | 传感器的身体 |
通常,艾莫斯所返回的数据融合在一起,解释成卷,音高,偏航的平台。现实世界的IMU传感器可以为每个单独的传感器有不同的轴。导航工具箱提供的模型假设单个传感器轴是一致的。

创建一个IMU传感器模型,使用imuSensor系统对象™。
IMU = imuSensor
IMU = imuSensor属性:IMUType:“accel-gyro”SampleRate: 100温度:25加速度计:[1×1 accelparams]陀螺仪:[1×1 gyroparams] RandomStream:“全球流”
默认的IMU模型包含一个理想的加速度计和一个理想的陀螺仪。的accelparams和gyroparams对象定义加速度计和陀螺仪的配置。你可以设置这些对象的属性来模拟特定的硬件和环境。IMU参数对象的更多信息,参见accelparams,gyroparams,magparams。
模型接收IMU传感器数据,调用乌兹别克斯坦伊斯兰运动模型与真实的加速度和角速度的平台:
trueAcceleration = (1 0 0);trueAngularVelocity = (1 0 0);[accelerometerReadings, gyroscopeReadings] = IMU (trueAcceleration trueAngularVelocity)
accelerometerReadings = -1.0000 0 9.8100 gyroscopeReadings = 1 0 0
您可以生成的真实轨迹IMU模型使用的输入kinematicTrajectory和waypointTrajectory。
全球定位系统
全球定位系统(GPS)为平台提供了三维位置信息(接收器)在地球表面。

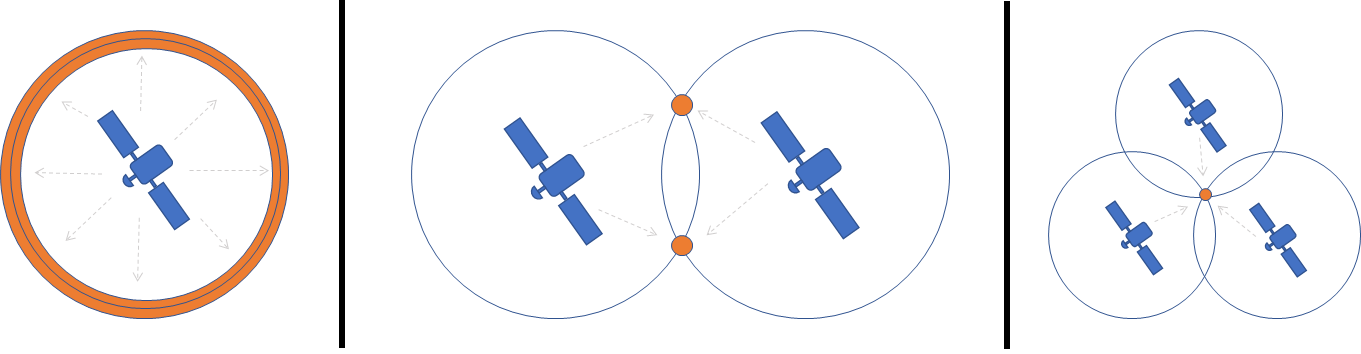
全球定位系统由一个不断绕着地球的卫星星座。卫星维护一个配置这样一个平台总是至少四颗卫星的内部视图。通过测量信号的飞行时间从卫星平台,平台的位置可以trilaterated。卫星时间戳一个广播信号,而平台的时钟在收到。三个卫星需要trilaterate在三维空间的位置。第四个卫星是需要正确的平台和卫星之间的时钟同步错误。
导航工具箱提供的GPS仿真模型平台(接收器)数据已经处理和解释为高度、纬度、经度、速度、水平和课程。
返回的GPS测量模型使用以下单位和协调公约。
| 输出 | 描述 | 单位 | 坐标系统 |
|---|---|---|---|
| LLA | 当前全球地位阅读大地坐标,基于wgs84Ellipsoid地球模型 | 度(纬度),度(经度)米(高度) | LLA |
| 速度 | 从GPS当前速度阅读 | 米/秒 | 当地NED |
| 水平速度 | 从GPS当前水平速度阅读 | 米/秒 | 当地NED |
| 课程 | 从GPS当前课程阅读 | 度 | 当地NED |
全球定位系统(GPS)模型允许您设置高层精度和噪声参数,以及接收更新速度和位置的引用。
要创建一个全球定位系统模型,使用gpsSensor系统对象。
全球定位系统(GPS) = gpsSensor
GPS与属性= gpsSensor: UpdateRate: 1 Hz ReferenceLocation:[0 0 0][度度m] HorizontalPositionAccuracy: 1.6 m VerticalPositionAccuracy: 3 m VelocityAccuracy: 0.1 m / s RandomStream:“全球流”DecayFactor: 0.999
模型接收GPS传感器数据,调用GPS真实模型与平台的位置和速度:
truePosition = (1 0 0);trueVelocity = (1 0 0);(LLA、速度、水平、课程)= GPS (truePosition trueVelocity)
LLA = = 1.0919 -0.0008 -0.1308 0.0000 0.0000 0.3031速度水平速度= 1.0919 = 359.9566
您可以生成的真实轨迹输入使用全球定位系统(GPS)模型kinematicTrajectory和waypointTrajectory。
惯性导航系统和全球定位系统
惯性导航系统(INS)利用惯性传感器像那些上发现一个IMU:加速度计、陀螺仪和磁力计。INS保险丝的惯性传感器数据计算的位置,方向和速度的一个平台。INS / GPS使用GPS数据正确INS。通常,INS和GPS数据与扩展卡尔曼滤波融合,INS数据用于预测的步骤,和GPS数据用于更新步骤。常用的INS / GPS船位推算,当GPS信号是不可靠的。
“INS / GPS”指的是整个系统,包括过滤。INS / GPS导航工具箱提供的仿真模型INS / GPS和返回的位置,速度,和定位报告的惯性传感器和基于真实运动的GPS接收器。
测量返回的INS / GPS使用以下单位和协调公约。
| 输出 | 描述 | 单位 | 坐标系统 |
|---|---|---|---|
| 位置 | 当前位置读取INS / GPS | 米 | 当地NED |
| 速度 | 当前的速度阅读从INS / GPS | 米/秒 | 当地NED |
| 取向 | 当前阅读取向的INS / GPS | 四元数或旋转矩阵 | N /一个 |
另请参阅
imuSensor|gpsSensor|insSensor|gnssSensor