永磁同步电动机磁场定向控制
永磁同步电机磁场定向控制
- 库:
Simscape /电气/控制/永磁同步电动机的控制
描述
的永磁同步电动机磁场定向控制块实现定向控制结构永磁同步电机(永磁同步电动机)。磁场定向控制(FOC)是一种高性能交流电机控制策略,将转矩和磁通通过固定相的电流转换为旋转框架。使用船当转子速度和位置是已知的和您的应用程序需要:
高扭矩、低电流启动。
效率高。
方程
永磁同步电动机FOC结构将转矩和磁通通过转子dq坐标系。这张图显示物体的整体架构。

图中:
ω和ω裁判分别测量和参考角速度。
T裁判是参考电磁转矩。
我和v定子电流和电压和下标吗d和问代表了d设在和问设在,下标一个,b,c,代表了三个定子绕组。
θe转子电角。
G选通脉冲,下标吗H和l,代表高和低,下标一个,b,c代表三个定子绕组。
您可以选择实现速度或转矩控制控制方式参数。块实现速度控制完全按照图中所示。块实现转矩控制通过移除速度控制器块和接受直接参考转矩。
假设
机器参数是已知的。
限制
的控制结构实现一个采样率。
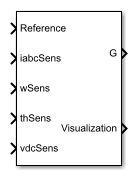
港口
输入
输出
参数
引用
[1]伯纳德,T。,V。F. Montagner, H. A. Gründling, and H. Pinheiro. "Discrete-time sliding mode observer for sensorless vector control of permanent magnet synchronous machine."IEEE工业电子产品。第四卷。61年,2014年,页1679 - 1691。
[2]Carpiuc, S。,C. Lazar. "Fast real-time constrained predictive current control in permanent magnet synchronous machine-based automotive traction drives."IEEE交通电气化。期,4号,2015年,页326 - 335。
[3]Haque m E。,l。Zhong, and M. F. Rahman. "Improved trajectory control for an interior permanent magnet synchronous motor drive with extended operating limit."电气与电子工程》杂志上。第一卷。22日,2003年,p . 49。
[4],N。,G。luo, W. Liu, and K. Wang. "Interior permanent magnet synchronous motor control for electric vehicle using look-up table."在第七届国际电力电子与运动控制会议。2卷,2012年,页1015 - 1019。