模拟被动雷达传感器和雷达干扰
这个例子展示了如何建模和模拟使用主动和被动雷达传感器的输出radarDataGenerator。在本例中,您观察射频(RF)干扰影响雷达的检测性能。此外,您使用被动雷达传感器估计的位置和类型射频干扰。
创建场景
评估雷达跟踪性能要求建模一个无线电频率(RF)的场景。建模工作流程如下:
产生射频排放。
传播排放和反映这些排放的平台。
接受排放,计算干扰损失,并生成检测。
在本例中您执行这些步骤使用场景组成的三个平台:
机载平台飞北从底部在500 km / h的场景
机载平台飞往南方在600 km / h的场景
机载平台飞东在700 km / h的场景
首先,创建场景和设置场景持续时间,然后创建三个机载平台。
现场= radarScenario;现场。StopTime = 10;% s%平台1:机载和往北500公里/小时社民党= 500 * 1 e3/3600;% m / swp1 = [0 0 -6000);wp2 =(社民党*的场景。StopTime 0 -6000];toa = [0;scene.StopTime];平台(场景,“轨迹”waypointTrajectory (“锚点”,(wp1;wp2),“TimeOfArrival”toa));%平台2:机载和南行600 km / h社民党= 600 * 1 e3/3600;% m / swp1 = [30 e3 +社民党*的场景。StopTime 0 -6000];wp2 = (e3 0 -6000);toa = [0;scene.StopTime];平台(场景,“轨迹”waypointTrajectory (“锚点”,(wp1;wp2),“TimeOfArrival”toa));%平台3:机载和东边的700 km / h社民党= 700 * 1 e3/3600;% m / swp1 = (10 e3 e3 -6000);wp2 = [10 e3 1 e3 +社民党*的场景。StopTime -6000);toa = [0;scene.StopTime];平台(场景,“轨迹”waypointTrajectory (“锚点”,(wp1;wp2),“TimeOfArrival”toa));
使用theaterPlot创建一个显示显示场景中的平台及其轨迹。
ax =轴;theaterDisplay = theaterPlot (“父”ax,“AxesUnit”,(“公里”“公里”“公里”),“XLim”(-10000 40000),“YLim”(-20000 20000),“ZLim”(1)e7 1 e7));视图(-90 [90])%交换X和Y轴补丁(“XData”(-10000 -10000 40000 40000),“YData”(-20000 20000 20000 -20000),“EdgeColor”,“没有”,“FaceColor”(0.8 0.8 0.8),“DisplayName的”,“地面”);platPlotter = platformPlotter (theaterDisplay,“DisplayName的”,“平台”,“MarkerFaceColor”,“k”);plotPlatform (platPlotter vertcat (scene.platformPoses.Position));trajPlotter = trajectoryPlotter (theaterDisplay,“DisplayName的”,“轨迹”,“线型”,“- - -”);allTrajectories = cellfun (@ (x) x.Trajectory.lookupPose (linspace (0 scene.StopTime 10)), scene.Platforms,“UniformOutput”、假);plotTrajectory (trajPlotter allTrajectories);

雷达检测的干扰排放
通常,雷达运行的环境中,其它不良射频排放干扰雷达发出的波形。当这种情况发生时,雷达的经历在检测性能退化的方向干扰信号。附加一个射频发射器的平台底部的场景(第一平台)和雷达平台顶部的场景(第二个平台)。
创建射频发射器
模型一个射频发射使用radarEmitter对象。发射器是一个前瞻性的配置的方位的视野20度包括场景中的其他两个平台。有效各向同性辐射功率(附近)设置干扰信号的强度。波形类型是一个用户定义的值用于列举各种波形类型出现在场景。对于这个场景,使用值0表示噪声波形类型。
%创建干扰发射器。rfEmitter = radarEmitter (1,“没有扫描”,…“FieldOfView”20 [5],…% (az el)度“附近”,200,…% dBi“CenterFrequency”300 e6,…%赫兹“带宽”,30 e6,…%赫兹“WaveformType”,0)% 0用于声排放
rfEmitter = radarEmitter属性:EmitterIndex: 1 UpdateRate: 1 ScanMode:“没有扫描”MountingLocation: [0 0 0] MountingAngles: [0 0 0] FieldOfView: [2 x1双]MechanicalAngle: 0 LookAngle: 0 HasElevation: 0附近:200 CenterFrequency: 300000000带宽:30000000 WaveformType: 0 ProcessingGain: 0
把发射器第一平台。
platEmit = scene.Platforms {1};platEmit。发射器= rfEmitter
platEmit =平台属性:PlatformID: 1 ClassID: 0位置:[0 0 -6000]取向:[0 0 0]维度:[1 x1 struct]轨迹:[1 x1 waypointTrajectory] PoseEstimator: [1 x1 insSensor]发射器:{[1 x1 radarEmitter]}传感器:{}签名:{[1 x1 rcsSignature]}
创建单站雷达
第二平台与单站雷达装备。使用radarDataGenerator这种类型的雷达建模。首先,创建一个单站雷达使用radarDataGenerator。配置雷达的安装定位,扫描方位部门在其平台的面前。使INS的输入,使雷达可以使用平台的姿态估计量在场景坐标输出检测。使干扰输入端口,所以上面创建的干扰信号发射器可以传递到雷达。
雷达= radarDataGenerator (2“部门”,…“DetectionMode”,“单站”,…“UpdateRate”,12.5,…%赫兹“FieldOfView”10 [2]);% (az el)度雷达。MountingAngles = (0 0 0);% Z Y X度雷达。之内= true;雷达。InterferenceInputPort = true;雷达。DetectionCoordinates =“场景”
雷达与属性= radarDataGenerator: SensorIndex: 2 UpdateRate: 12.5000 DetectionMode:“单站”ScanMode:“机械”InterferenceInputPort: 1 EmissionsInputPort: 0 MountingLocation: [0 0 0] MountingAngles: [0 0 0] FieldOfView: 10 [2] LookAngle: [0 0] RangeLimits: 100000年[0]DetectionProbability: 0.9000 FalseAlarmRate: 1.0000 e-06 ReferenceRange: 100000 TargetReportFormat:“集群检测”显示所有属性
把雷达第二平台。
platRadar = scene.Platforms {2};platRadar。传感器=雷达;
更新显示显示平台,雷达和发射器的场景。
emitterColor = (0.9290 0.6940 0.1250);radarColor = 0.4470 - 0.7410 [0];platEmitPlotter = platformPlotter (theaterDisplay,“DisplayName的”,“射频发射器”,“标记”,' d ',“MarkerFaceColor”,emitterColor);platRadarPlotter = platformPlotter (theaterDisplay,“DisplayName的”,“单站雷达”,“标记”,' d ',“MarkerFaceColor”,radarColor);platPlotter。DisplayName =“目标”;clearData (platPlotter);covPlotter = coveragePlotter (theaterDisplay,“α”,0.2 [0]);detPlotter = detectionPlotter (theaterDisplay,“DisplayName的”,雷达信号检测的,“MarkerFaceColor”,radarColor);标题(“雷达探测和干扰发射器”);plotPlatform (platRadarPlotter platRadar.pose.Position);plotPlatform (platEmitPlotter platEmit.pose.Position);plotPlatform (platPlotter scene.Platforms {3} .pose.Position);plotCoverage (covPlotter coverageConfig(场景),[1 - 2],{emitterColor, radarColor});
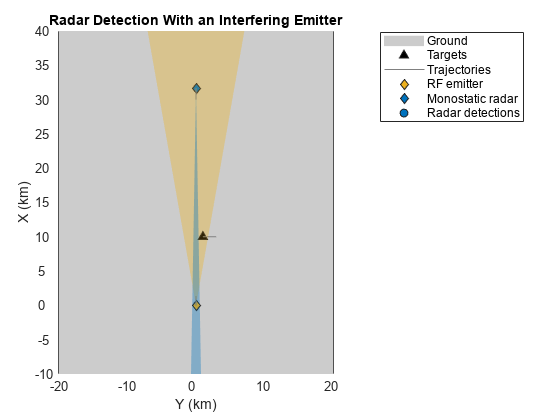
在前面的图中,平台进行前瞻性的雷达显示为蓝色的钻石,和雷达的当前的视野是一个来自平台的蓝色区域。底部的图,平台携带干扰射频发射显示为黄色的钻石,和发射器的当前的视野是一个相应的黄色区域。平台没有任何排放或附加传感器被称为目标和显示为黑色的三角形。
模拟单站检测
在多重速率的情况下,你可以找到一个更新率,是一种常见的分频器中定义的所有传感器和发射器的利率或您可以使用连续更新的场景中,进展到下一个有效的场景自动更新时间当你调用推进。
现场。UpdateRate = 0
现场= radarScenario属性:IsEarthCentered: 0 UpdateRate: 0 SimulationTime: 0 StopTime: 10 SimulationStatus: NotStarted平台:{[1 x1 radar.scenario。][1 x1 radar.scenario平台。][1 x1 radar.scenario平台。平台]}SurfaceManager: [1 x1 radar.scenario。SurfaceManager] AtmosphereManager: [1 x1 radar.scenario.AtmosphereManager]
在以下循环,为每个步骤使用:
推进所有的移动平台根据他们的轨迹。发出更新的传输方向排放platEmit。传播传播的直接排放到每个平台的场景在发射器的视野。每个平台,收到直接路径发射产生一跃反射也传播到其他平台作为一个反映发射。检测从排放生成检测得到platRadar。
下图显示了排放的传播从发射器到雷达传感器。

%设置随机种子可重复的结果。rng (2018);plotDets = {};而推进(场景)%发射射频信号。txEmiss =排放(现场);%反映场景中的平台发出的信号。reflEmiss =传播(场景、txEmiss);%从单站雷达传感器生成检测。[引爆器,配置]=检测(现场,reflEmiss);%重置每次检测雷达完成部门扫描。如果config.IsScanDone%重置plotDets =侦破;其他的%的缓冲plotDets = (plotDets;依据);% #好< AGROW >结束%更新显示与当前平台位置,梁的位置和检测。plotPlatform (platRadarPlotter platRadar.pose.Position);plotPlatform (platEmitPlotter platEmit.pose.Position);plotPlatform (platPlotter scene.Platforms {3} .pose.Position);plotCoverage (covPlotter coverageConfig(场景),[1 - 2],{emitterColor, radarColor});如果~ isempty (plotDets) allDets = [plotDets {}):;%提取列向量测量位置量= (allDets.Measurement) ';plotDetection (detPlotter量);结束结束
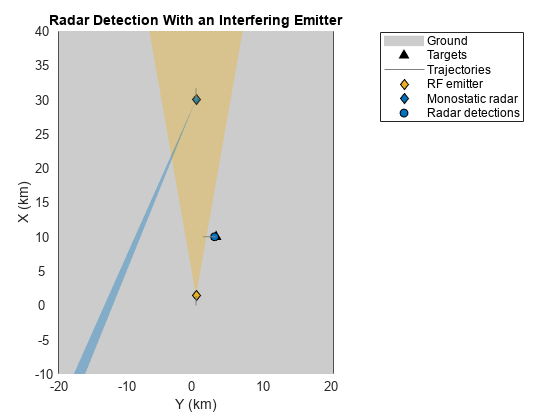
前面的图显示雷达(蓝色所示)只能探测到目标的场景。检测显示为蓝色,满圈,每当雷达的视野(即波束宽度)扫过目标。然而,当雷达的波束扫描整个发射平台(黄色)所示,没有检测生成,因为这个平台可以防止产生的干扰雷达的检测。
被动射频检测排放
在前面的部分中,雷达无法检测发射平台的位置,因为平台的排放量面具雷达的排放。然而,如此强劲的排放可以被动地检测和识别传感器,监听射频排放。这些传感器通常被称为电子支援措施(ESM)。万博1manbetx这些传感器通常听在很大范围内的频率和试图识别独特的排放,排放的方向到达这些发射器,,只要有可能,波形的类型使用的排放国。
创建一个ESM传感器
重用前一节的场景,但取代单站雷达与ESM传感器第一平台。使用radarDataGenerator模型ESM传感器和确保传感器配置,这样它的中心频率和带宽包括发射器的射频频谱。否则,它将无法检测发射器。
重启(现场);esm = radarDataGenerator (1,“没有扫描”,…“DetectionMode”,ESM的,…“UpdateRate”,12.5,…%赫兹“MountingAngles”(0 0 0),…% Z Y X度“FieldOfView”30 [10],…% (az el)度“CenterFrequency”300 e6,…%赫兹“带宽”,30 e6,…%赫兹“WaveformTypes”0,…%检测干扰波形类型“之内”,真正的)
esm = radarDataGenerator属性:SensorIndex: 1 EmitterIndex: 1 UpdateRate: 12.5000 DetectionMode:“esm”ScanMode:“没有扫描”MountingLocation: [0 0 0] MountingAngles: [0 0 0] FieldOfView: 30 [10] FalseAlarmRate: 1.0000 e-06显示所有属性
更换雷达与ESM传感器第二平台。
platESM = scene.Platforms {2};platESM。传感器= esm;
更新相应的可视化。
platRadarPlotter。DisplayName =“ESM传感器”;esmColor = (0.4940 0.1840 0.5560);platRadarPlotter。MarkerFaceColor = esmColor;%使用辅助添加一个angle-only检测绘图仪删除(detPlotter);esmDetPlotter = helperAngleOnlyDetectionPlotter (theaterDisplay,“DisplayName的”,“ESM检测”,“颜色”esmColor,“线型”,“- - -”);clearData (covPlotter);plotCoverage (covPlotter coverageConfig(场景),[1],{emitterColor, esmColor});标题(“被动射频检测排放”);
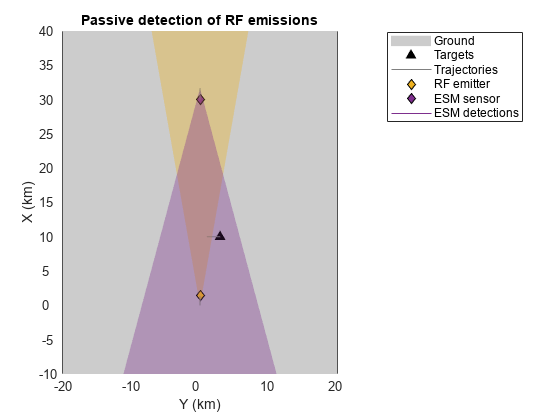
在前面的图中,雷达被一个ESM传感器安装在第二个平台。ESM传感器的视场红色所示和包括发射和目标平台。
模拟ESM信号检测
现在模拟检测使用ESM传感器代替雷达。注意,因为ESM传感器是一种被动式传感器,它无法定位发射平台,但显示的方向到达平台的排放。这些angle-only检测显示为射线来自ESM传感器发射平台。
%设置随机种子可重复的结果。rng (2018);plotDets = {};提前= [];而推进(场景)%发射射频信号。txEmiss =排放(现场);%反映场景中的平台发出的信号。reflEmiss =传播(场景、txEmiss);%从ESM传感器生成检测。[引爆器,配置]=检测(现场,reflEmiss);%重置每次检测雷达完成部门扫描。如果config.IsScanDone%重置plotDets =侦破;其他的%的缓冲plotDets = (plotDets;依据);% #好< AGROW >结束%更新显示与当前平台位置,梁位置和检测。plotPlatform (platRadarPlotter platRadar.pose.Position);plotPlatform (platEmitPlotter platEmit.pose.Position);plotPlatform (platPlotter scene.Platforms {3} .pose.Position);plotCoverage (covPlotter coverageConfig(场景),[1],{emitterColor, esmColor});plotDetection (esmDetPlotter plotDets);%记录反射检测t = 2秒。提前= getSnap (ax,场景。SimulationTime 2吸附);drawnow结束标题(射频发射器一个ESM传感器探测到的);
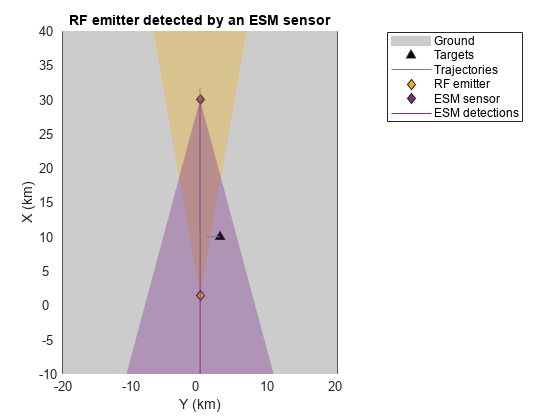
ESM传感器检测RF排放和估计到达的方向。这估计是红色线所示来自传感器和密切经过发射器。角估计是嘈杂的,这就是为什么线不直接通过发射器的位置。
ESM传感器分类的波形类型检测报告。对于这个发射器,它报告使用的噪音波形类型发射器:0。
依据{1}.ObjectAttributes {1}
ans =结构体字段:TargetIndex: 1 EmitterIndex: 1 WaveformType: 0信噪比:173.8303
注意,发出信号的信噪比(信噪比)传感器检测到的非常大,185分贝。由于高功率射频发射器,反射的发射波形也ESM传感器检测到的目标。这是在2秒进入模拟,当目标在视场的排放国。
图;imshow (snap.cdata);标题(发射器和目标一个ESM传感器探测到的);
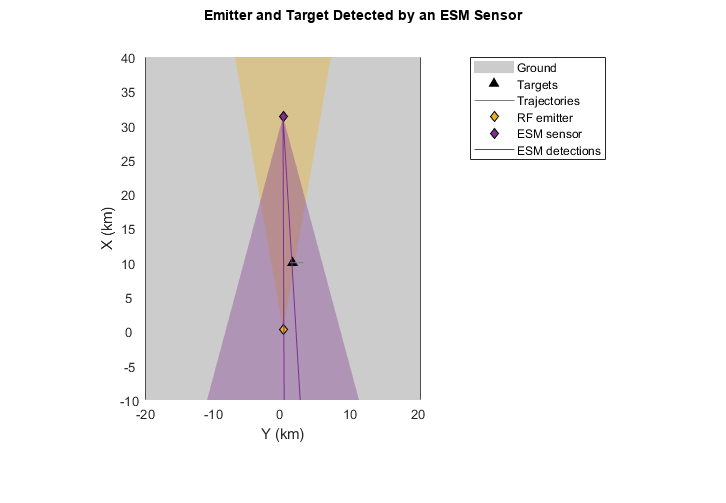
前面的图中显示排放量从发射器和检测目标,目标从发射器和接收能量回送,波形回场景中,导致其ESM传感器可以探测到。
被动检测单站雷达
也单站雷达发射波形的场景。这些排放的被动检测有时是可取的。要做到这一点,你必须模型雷达的发射和传感部分分开。发射器产生的波形成为场景的一部分的射频排放。这些波形可以被其他传感器,比如ESM传感器。
之前的重用相同的场景。对于这个场景,附加的单站雷达平台顶部的场景(第二个平台),并附上一个ESM传感器平台底部的场景(第一平台)。中间平台仍然是一个目标没有发射器和传感器连接到它。
重启(现场);
通过建模创建一个单站雷达发射和传感器的传感部分。使用radarEmitter模型的单站雷达发射器。对于这个场景,使用1来表示这个雷达波形所使用的类型。波形类型是由用户定义的枚举来表示不同的波形模拟的场景。波形枚举使发射器和传感器能够知道如何处理这些波形生成检测。例如,如果一个发射器的波形类型1和一个传感器包括这个波形的列表,那么传感器知道如何处理排放的排放(例如,使用匹配滤波器)和实现波形的相关处理增益。
%为单站雷达创建发射器。radarTx = radarEmitter (2“部门”,…“UpdateRate”,12.5,…%赫兹“MountingAngles”(0 0 0),…% Z Y X度“FieldOfView”,10 [2],…% (az el)度“CenterFrequency”300 e6,…%赫兹“带宽”,3 e6,…%赫兹“ProcessingGain”,50岁,…% dB“WaveformType”,1)%使用1来表示这个雷达的波形。
radarTx = radarEmitter属性:EmitterIndex: 2 UpdateRate: 12.5000 ScanMode:“机械”MountingLocation: [0 0 0] MountingAngles: [0 0 0] FieldOfView: [2 x1双]MaxMechanicalScanRate: 75 MechanicalScanLimits: 45 [-45] MechanicalAngle: 0 LookAngle: 0 HasElevation: 0附近:100 CenterFrequency: 300000000带宽:3000000 WaveformType: 1 ProcessingGain: 50
使用radarDataGenerator模型的传感部分雷达接收RF排放在该方案中,标识对应的排放单站发射器的波形类型,并生成检测从这些收到排放。排放不匹配发射器的波形类型被视为干扰。
当使用radarDataGenerator模型的传感部分单站雷达、设置DetectionMode属性的传感器单站。这告诉传感器使用发射器的配置在处理接收到的射频排放。的EmissionsInputPort属性必须设置正确,使检测radarEmission对象。
radarRx = radarDataGenerator (2…“DetectionMode”,“单站”,…“EmissionsInputPort”,真的,…“EmitterIndex”radarTx.EmitterIndex,…“之内”,真的,…“DetectionCoordinates”,“场景”)
radarRx = radarDataGenerator属性:SensorIndex: 2 EmitterIndex: 2 DetectionMode:“单站”InterferenceInputPort: 0 EmissionsInputPort: 1 RangeLimits: [0 100000] FalseAlarmRate: 1.0000 e-06显示所有属性
把雷达发射器和传感器第二平台。
platRadar = scene.Platforms {2};platRadar。发射器= radarTx;platRadar。传感器= radarRx;
从之前重用ESM传感器,但设置的已知波形类型列表ESM传感器包括雷达发出的波形。如果雷达的波形类型不是ESM传感器,它不会被检测出来。
%增加雷达的波形已知波形类型ESM传感器的列表。esm。WaveformTypes = [0 1];% ESM传感器附加到第一平台。platESM = scene.Platforms {1};platESM。发射器= {};%删除发射器。platESM。传感器= esm;
更新显示显示单站检测和ESM信号检测。
detPlotter = detectionPlotter (theaterDisplay,“DisplayName的”,雷达信号检测的,“MarkerFaceColor”,radarColor);platRadarPlotter。DisplayName =“单站雷达”;platRadarPlotter。MarkerFaceColor = radarColor;platEmitPlotter。DisplayName =“ESM传感器”;platEmitPlotter。MarkerFaceColor = esmColor;clearData (esmDetPlotter);clearData (covPlotter);covcon = coverageConfig(现场);plotCoverage (covPlotter covcon ([1 3]), [1 - 2], {esmColor, radarColor});标题(ax,“单站雷达被动检测”);
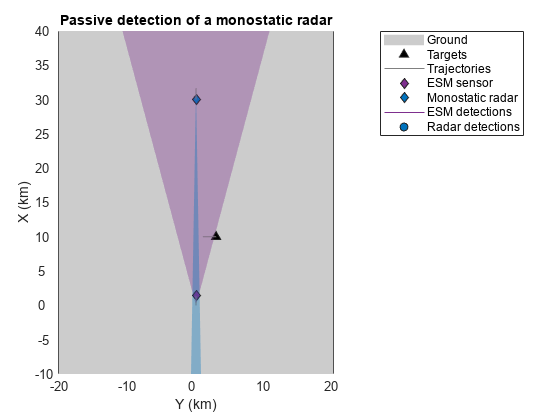
前面的图中显示的雷达扫描方位部门面前的平台,包括目标平台以及平台携带ESM传感器。雷达为这两个平台生成检测时的视野(蓝色)所示扫过他们的位置。然而,当雷达的波束覆盖的位置ESM传感器、雷达和ESM传感器检测表明估计的位置画一条线,来自传感器。
%设置随机种子可重复的结果。rng (2018);平台= scene.Platforms;numPlat =元素个数(平台);plotDets = {};提前= [];而推进(场景)%发射射频信号。[txEmiss, txConfigs] =排放(现场);%反映场景中的平台发出的信号。reflEmiss =传播(场景、txEmiss);%生成检测的传感器。[引爆器,配置]=检测(现场,reflEmiss txConfigs);%重置每次检测雷达完成部门扫描。如果txConfigs .IsScanDone(结束)%重置plotDets =侦破;其他的%的缓冲plotDets = (plotDets;依据);% #好< AGROW >结束%更新显示与当前平台位置,梁位置和检测。plotPlatform (platRadarPlotter platRadar.pose.Position);plotPlatform (platEmitPlotter platEmit.pose.Position);plotPlatform (platPlotter scene.Platforms {3} .pose.Position);covcon = coverageConfig(现场);plotCoverage (covPlotter covcon ([1 3]), [1 - 2], {esmColor, radarColor});plotDetection (esmDetPlotter plotDets);plotMonostaticDetection (detPlotter plotDets);%记录反射检测t = 5.6秒。提前= getSnap (ax,场景。SimulationTime, 5.6,吸附);drawnow结束

检测的单站雷达建模使用radarEmitter和radarDataGenerator显示为满,蓝色圈附近的目标和配备ESM传感器平台。ESM传感器也能够探测雷达,angle-only检测表明,显示为一行来自ESM传感器和雷达平台附近通过。
图;imshow (snap.cdata);标题(雷达和ESM传感器探测到目标的);
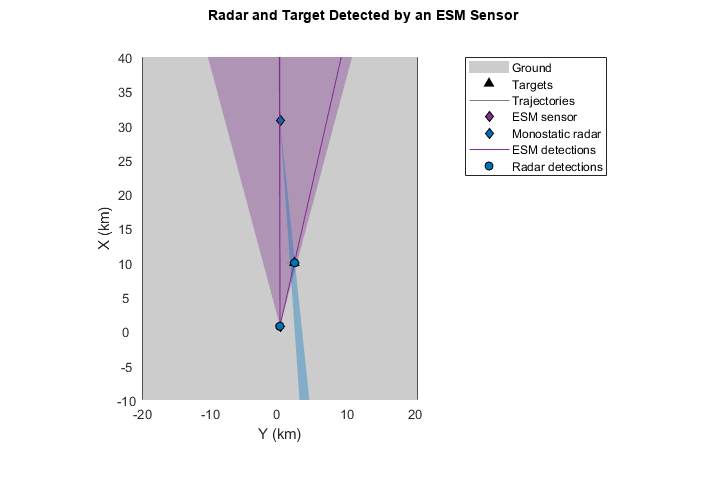
由于高功率雷达(附近)的排放,释放出的能量就是对ESM反射目标平台。因此,ESM传感器检测到目标平台雷达发射器的视野扫过去的目标平台的目标仍然是在ESM传感器的视场。
万博1manbetx支持功能
getSnap记录在给定的阶跃时间轴的一个快照。
函数提前= getSnap (hAx curTime、snapTime prevSnap)如果~ isempty (prevSnap)提前= prevSnap;elseifcurTime > = snapTime & & curTime hAx.Title < snapTime + 0.05。可见=“关闭”;提前= getframe (hAx.Parent);hAx.Title。可见=“上”;其他的提前= [];结束结束
plotMonostaticDetection解析情节只有单站检测检测detectionPlotter。
函数plotMonostaticDetection(绘图仪,依据)如果~ isempty(依据)%通过detectionPlotter只有单站检测radarDetId = cellfun (@ x (x)。SensorIndex = = 2,依据);如果任何(radarDetId)%提取单站雷达测量位置radarDets =[侦破{radarDetId}];量= (radarDets.Measurement) ';plotDetection(绘图仪、量);结束结束结束