控制器persecución pura
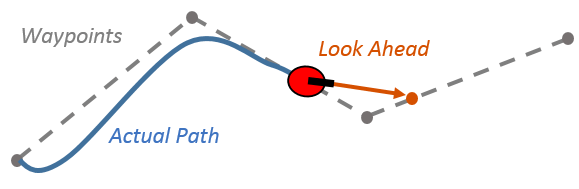
纯粹的追求是对现实的一种算法。计算机器人的速度和角度,我们可以把机器人的实际速度计算为algún,我们可以把机器人的速度计算为algún。直系的速度是不变的,我们可以看到机器人的直系速度是不变的。A continuación, el algoritmo mueve el punto de vista hacia en la ruta en función dela posición实际机器人hasta el último punto dela ruta。我们应该把这个机器人放在él上。距离决定了我们可以在qué旁观看búsqueda旁观看。
我们不反对传统的管制,但是我们可以在法律上对进入的道路进行罚款。controllerPurePursuit管制员列出了详细的路标。特别是线形和角形的流速。在función上,在vehículo上的规定。这个姿势(posición y orientación) del vehículo是我们的目标,我们想用这个角度来计算机器人的速度。机器人使用的形式取决于系统的形式esté应用程序,así考虑到cómo机器人可以使用它的形式。这里的última是最重要的,如果我们把机器人放在这里,我们就会把它放在这里。LookAheadDistance在此详细说明más详细说明sección a continuación。
参考坐标系统
很重要的一点是,我们要了解参考坐标的含义,我们要利用我们的算法。我们有一个很好的参考坐标系统。在坐标上的路径点,我们可以计算机器人的速度。(x, y)机器人的姿势是我们的机器,我们的姿势是orientación (theta),它是我们的机器。(x yθ)正向的方向为están,正向的方向为不同的种植方式的方向(蓝色和figura)。xy机器人的能量是orientación的角,它的方向是逆方向,它的弧度是e(机器人的实际弧度)。θx0

Mirar是距离的象征
它是它的主要控制方。LookAheadDistance我们的距离是在计算机器人的角度时实际计算出来的。我们想要一个机器人,它的位置在这里。当我们从图像上看的时候,我们会发现所有的路标都不一致。
工作的效果是parámetro我们可以把机器人的形式和工作原理结合起来:恢复工作和工作。在我们的导航点上恢复rápidamente,在我们的导航点上恢复pequeño hará,我们的机器人在我们的导航点上恢复rápidamente。LookAheadDistance由于禁运,我们不能在阿巴霍的figura上使用机器人,机器人的数量超过了它的数量,它的数量超过了它的数量。在我们的家乡,在我们的家乡,在我们的家乡,在我们的家乡,在我们的家乡,在我们的家乡,在我们的家乡,在我们的家乡,在我们的家乡。
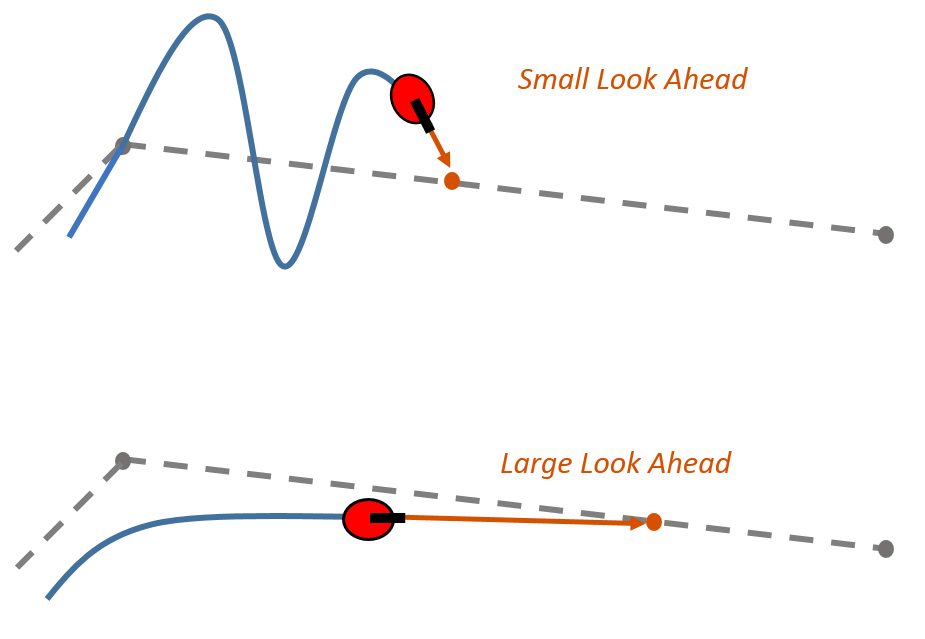
他的名字应该是这个机器人的名字。LookAheadDistance不同的速度线有不同的角度,在不同的速度线有不同的角度。
Limitaciones
我们可以通过我们的算法来限制我们的行为:
我们很清楚,我们不能确切地看到所有的路标。我们应该把最优的结果和时间的结果结合起来。
我们的算法是:我们不能用一种语言来建立机器人。在aplicación中,我们可以应用一个距离的本影,在ubicación中,我们可以用机器人来控制这个距离。
Referencias
[1]库尔特,R。实现了纯追踪路径跟踪算法.卡内基梅隆大学,匹兹堡,宾夕法尼亚州,1990年1月。
Consulte也
stateEstimatorPF|controllerVFH(导航工具箱)
你也可以从以下列表中选择一个网站: