直流电机控制器的健壮的调优
这个例子展示了如何大力优化PID控制器对直流电机与不完全已知参数。
直流电机的建模
一个不确定的模型推导出直流电机的“直流电机伺服控制器的鲁棒性”的例子。外加电压的传递函数给出的角速度

的阻力 ,电感
,电感 EMF常数
EMF常数 电枢常数
电枢常数 ,粘滞摩擦
,粘滞摩擦 和惯性负载
和惯性负载 电机的物理参数。这些参数不完全已知和可能变更,所以我们模型的不确定值指定范围或百分比的不确定性。
电机的物理参数。这些参数不完全已知和可能变更,所以我们模型的不确定值指定范围或百分比的不确定性。
R =尿素的(“R”2,“比例”,40);L =尿素的(“L”,0.5,“比例”,40);K =尿素的(“K”,0.015,“范围”[0.012 - 0.019]);公里= K;Kb = K;Kf =尿素的(Kf的,0.2,“比例”,50);J =尿素的(“J”,0.02,“比例”,20);P =特遣部队(公里[J * L * R + Kf * * Kb + Kf * R L公里]);P。InputName =“电压”;P。OutputName =“速度”;
时间和频率响应函数一步或波德自动样品不确定参数范围内。这是有助于评估不确定性的影响。例如,情节不确定工厂的阶跃响应P注意大型植物直流增益的变化。
步骤(P, getNominal (P), 3)传说(“采样的不确定性”,“名义”)

鲁棒PID调优
大力调整PID控制器的直流电机,创建一个可调的PIDC和建立一个闭环模型CL0的反馈回路如图1所示。添加一个分析点dLoad核电站输出测量负载扰动的敏感性。
C = tunablePID (“C”,“pid”);美联社= AnalysisPoint (“dLoad”);CL0 =反馈(美联社* P * C, 1);CL0。InputName =“SpeedRef”;CL0。OutputName =“速度”;
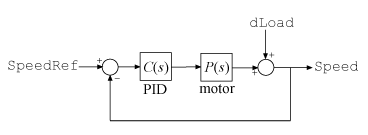
图1:PID控制的直流电机
有很多方法可以指定所需的性能。我们专注于对负载扰动的敏感性,碾轧,闭环动力学。
R1 = TuningGoal.Sensitivity (“dLoad”特遣部队(1.25 [0],[1 - 2]));R2 = TuningGoal.MaxLoopGain (“dLoad”10 (1);R3 = TuningGoal.Poles (“dLoad”,0.1,0.7,25);
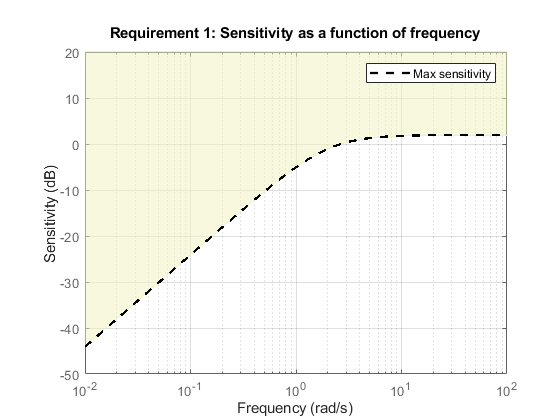
第一个目标R1指定为灵敏度函数所需的概要文件。低频灵敏度要低,以获得良好的抗干扰性。第二个目标R2征收-20 dB /十年碾轧过去10 rad / s。第三个目标R3指定的最小衰减、最小阻尼和最大固有频率的闭环极点。
viewGoal (R1)
viewGoal (R2)

viewGoal (R3)

您现在可以使用systune大力调整PID收益,满足设计目标所有可能的值的不确定的直流电机参数。因为可能存在局部最小值,执行三个独立的调优从三个不同的初始增益值。
选择= systuneOptions (“RandomStart”2);rng (0), CL, fSoft = systune (CL0, (R1, R2 R3),选择);
名义调优:设计1:软= 0.838,硬=负设计2:软= 0.838,硬=负设计3:软= 0.914,=从健壮的调优的设计2:软:[0.838,2.01],硬:负无穷,无穷,迭代= 40软:[0.875,1.76],硬:负无穷,无穷,迭代= 29软:[0.935,2.77],硬:负无穷,无穷,迭代= 28软:[1.35,1.35],硬:负无穷,无穷,迭代= 35决赛:软= 1.35,=无穷,迭代= 132稳健优化设计1:软:[0.838,1.96],硬:负无穷,无穷,迭代= 65软:[0.875,1.78],硬:负无穷,无穷,迭代= 28软:[0.935,2.77],硬:负无穷,无穷,迭代= 27软:[1.35,1.35],硬:负无穷,无穷,迭代= 35决赛:软= 1.35,=无穷,迭代= 155稳健优化设计3:软:[0.914,2.38],硬:负无穷,无穷,迭代= 57软:[1.01,3.38],硬:负无穷,无穷,迭代= 27软:[0.948,2.32],硬:负无穷,无穷,迭代= 66软:[1.32,1.41],硬:负无穷,无穷,迭代= 30软:[1.35,1.35],硬:负无穷,无穷,迭代= 22决赛:软= 1.35,=无穷,迭代= 202
最终值接近于1的调优目标几乎是实现整个范围的不确定性。调整PID控制器
showTunable (CL)
C = 1 s Kp + Ki * -, + Kd * - - - - - - - Tf *年代和Kp = 33.8 + 1, Ki = 83.2, Kd = 2.34, = 0.028特遣部队的名字:C连续时间PIDF控制器并联形式。
下一步检查这个PID拒绝负载扰动30随机选择的不确定参数的值。
S = getSensitivity (CL,“dLoad”);clf步骤(usample(年代,30),getNominal (S), 3)标题(负载扰动抑制的)传说(“采样的不确定性”,“名义”)

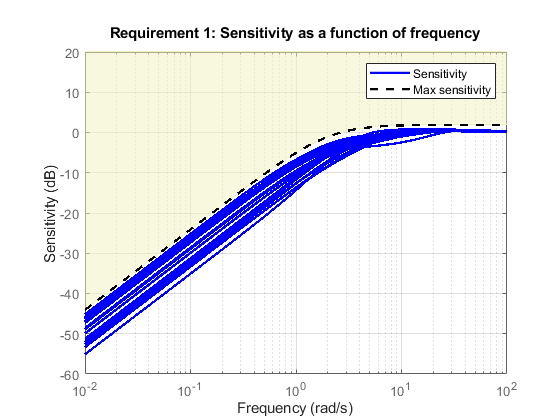
拒绝性能仍然是统一尽管大型植物的变化。你也可以验证灵敏度函数强劲保持在规定的约束。
viewGoal (R1, CL)
健壮的优化与systune是很容易的。只包括植物可调的不确定性闭环模型使用尿素的对象,软件会自动尝试实现优化目标为整个范围的不确定性。