开始使用ROS工具箱
设计、模拟和部署ROS-based应用程序
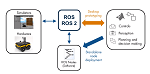
ROS工具箱提供了一个接口连接MATLAB® 和仿真软万博1manbetx件® 机器人操作系统(ROS和ROS 2),使您能够创建一个ROS的网络节点。工具箱包括导入MATLAB函数和Simulink块,分析和回放ROS数据记录在ros万博1manbetxbag文件。你也可以连接到一个住ROS网络访问ROS的消息。
工具箱可以通过桌面仿真以验证ROS节点连接到外部露台等机器人仿真器。ROS工具箱万博1manbetx支持c++代码生成(万博1manbetx仿真软件编码器™),使您能够从一个仿真软件模型自动生成活性氧节点和部署模拟或物理硬件。万博1manbetx万博1manbetx支持仿真软件外部模式允许万博1manbetx您查看消息模型和参数变化而在硬件上运行。
教程
- 开始使用ROS
机器人操作系统(ROS)是一个通信接口,使机器人系统的不同部分中发现彼此,以及它们之间发送和接收数据。 - 开始与ROS在仿真软件万博1manbetx
这个例子展示了如何使用仿真软件®块ROS从本地ROS网络发送万博1manbetx和接收消息。 - 处理基本的ROS消息
消息交换数据的主要容器ROS。 - 与ROS交换数据发布者和订阅者
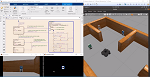
活性氧的主要机制节点交换数据发送和接收消息。 - 从露台和模拟TurtleBot开始
这个例子展示了如何设置露台®模拟器引擎。 - 开始使用ROS 2
机器人操作系统(ROS 2)是ROS的第二个版本,这是一个机器人系统的通信接口,使不同地区发现,发送和接收数据。 - 开始使用ROS 2模型®万博1manbetx
这个例子展示了如何使用仿真软件对ROS 2块从本地ROS 2万博1manbetx网络发送和接收消息。 - 处理基本的ROS 2消息
ROS消息是主要的ROS 2交换数据的容器。 - 与ROS 2交换数据发布者和订阅者
活性氧的主要机制2节点交换数据发送和接收消息。
ROS
ROS 2
对机器人操作系统
- 机器人操作系统(ROS)
ROS框架的详细信息和链接相关的例子开始。
- ROS工具箱系统需求
总结ROS工具箱系统需求和MATLAB支持不同的平台和版本。万博1manbetx
- 内置的信息支持万博1manbetx
在MATLAB环万博1manbetx境下支持的ROS消息类型列表。
- ROS仿万博1manbetx真软件支持和限制万博1manbetx
ROS工具箱不支持以下ROS在仿真软件功能:万博1manbetx万博1manbetx
视频
ROS工具箱是什么?
探索如何使用ROS工具箱为自治系统的设计和开发。
编程机器人使用MATLAB和Simulink ROS和ROS 2万博1manbetx
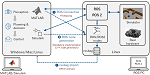
连接到活性氧ROS 2、设计机器人感知和控制算法在MATLAB和Simulink,并部署它们作为独立的ROS节点。万博1manbetx
自动化的活性氧ROS 2节点生成从原型到生产
c++和CUDA部署®——优化活性氧ROS 2节点从MATLAB脚本和仿真软件模型。万博1manbetx