调整机体自动驾驶仪收益
这个例子展示了如何应用仿真软件®设计优化™优化机身的自动增益控制万博1manbetx鳍偏转。从航空航天模型使用块Blockset™。
自动驾驶仪控制器由一个内循环和外垂直加速度循环。这两个控制器只积分控制器。的收益控制器调整来满足一个2秒上升时间阶跃响应的特征。
打开nlairframe_demo使用下面的命令和运行仿真模型。仿真产生非垂直加速度的机身和优化的初始数据。
open_system (“nlairframe_demo”)
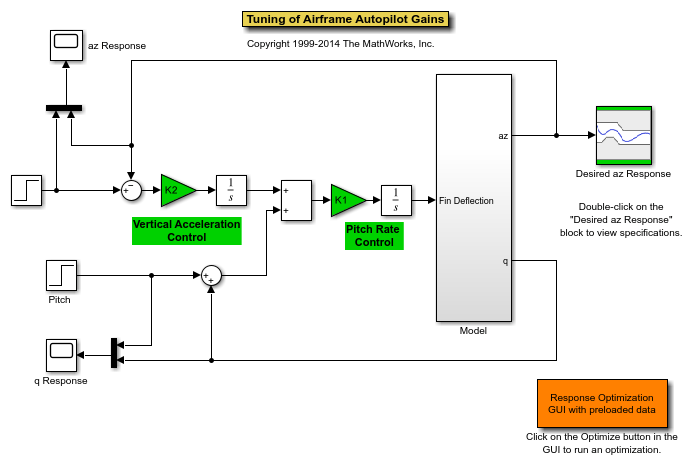
双击阿兹反应范围块视图实现垂直加速度az的机体。
双击问响应范围块视图实现转速机身的问。
双击模型块视图的详细信息子系统。它包括一个大气模型和空气动力学和运动方程模型。
双击反应所需的阿兹块查看机身垂直加速度的约束。这些约束是用来同时优化两个积分控制器的增益。第一部分的上界约束代表一个过度。请注意,这是一种软约束,可以侵犯。
你可以启动响应优化器使用应用程序菜单在仿真软件将来发布,万博1manbetx或sdotool在MATLAB®命令。您可以启动一个预先配置的优化任务响应优化器首先打开模型并通过双击橙色块模型的底部。从响应优化器,按下图模型反应按钮来模拟模型和显示最初的设计如何满足设计要求。

我们开始优化按优化按钮响应优化器。故事情节表明更新设计要求已经满足。


深色的曲线显示了最终的优化机体的反应。
%关闭模式。bdclose (“nlairframe_demo”)