运动学与柔度虚拟测试实验室
基于模型的校准工具箱™允许您生成优化的悬架参数独立悬架-映射而且固体轴悬挂-映射采用运动学(K)和柔度(C)虚拟测试实验室。
要创建并打开K和C虚拟测试实验室参考应用程序的工作副本,输入
虚拟测试实验室包括车辆、测试系统和测试控制子系统。车辆系统有两种变体:
Simscape多体车-有Simscape™多体™悬架系统一家汽车-有独立悬架-映射块
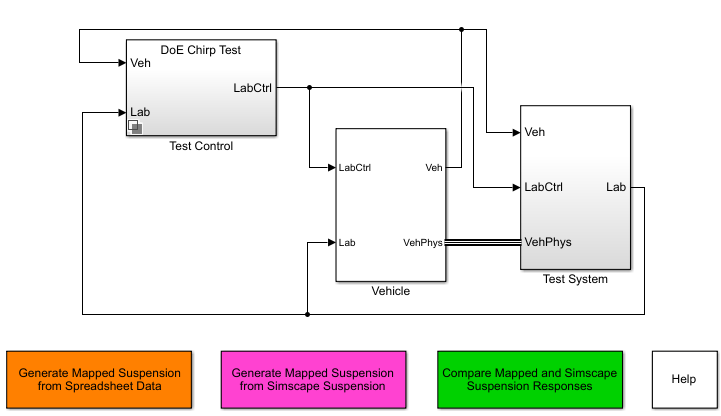
下表总结了虚拟测试实验室测试。
| 测试 | 客观的 | 方法 |
|---|---|---|
从电子表格数据生成映射的悬挂 |
使用测量的垂直力和悬挂几何数据,为映射的悬挂块生成校准的悬挂参数。 请注意 您可以使用第三方仿真模型来生成测量的悬架数据。 |
虚拟试验室使用基于模型的校准工具箱对数据拟合弯曲角、趾角和垂直力响应模型。虚拟测试实验室然后使用响应模型生成悬架块的悬架参数。 |
从Simscape悬挂生成映射的悬挂 |
使用一个Simscape多体悬架系统生成校准的悬架参数,为悬架映射块。 |
虚拟试验室使用基于模型的校准工具箱对悬架高度和手轮角工作点进行Sobol序列实验设计。在每个操作点上,参考应用程序都会激活Simscape多体一个频率范围为0.1到2hz的啁啾信号悬挂系统。虚拟测试实验室然后使用数据拟合悬架垂直力,倾角角,和趾角与高斯过程模型(GPM)作为悬架状态的函数。最后,参考应用程序使用GPM为悬挂块生成悬挂参数。 |
比较映射和Simscape悬挂响应 |
将映射的悬架与Simscape多体悬挂的结果。 |
虚拟测试实验室刺激Simscape多体悬架在一个工作点,然后比较响应与映射悬架。 |
从电子表格数据生成映射的悬挂
虚拟试验室使用基于模型的校准工具箱对数据拟合弯曲角、趾角和垂直力响应模型。虚拟测试实验室然后使用响应模型生成悬架块的悬架参数。
生成映射悬架校准
使用电子表格文件字段提供数据文件。默认情况下,引用应用程序具有
KandCTestData.xlsx包含必需的数据。该表总结了生成校准表的数据文件要求。数据 描述 生成映射悬挂表的数据要求 z 垂直轴悬挂高度,单位m
要求
zdot 垂直轴悬挂高度速度断点,单位为m/s
要求
str 转向角,弧度
要求
Fz 垂直轴悬挂力,单位N
要求
ca 弧度角
要求
助教 脚趾角,弧度
要求
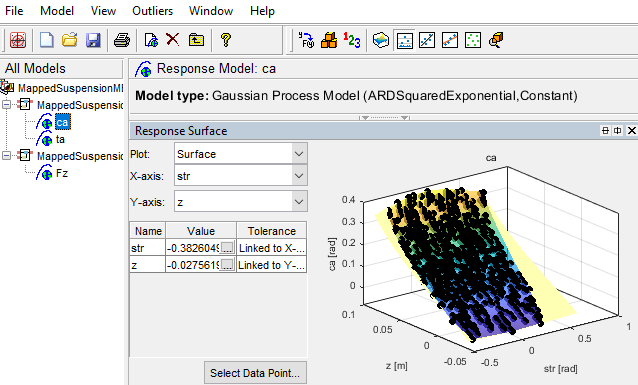
点击生成映射悬架校准在基于模型的校准工具箱中生成响应面模型。
模型浏览器在流程完成时打开。你可以查看曲面角度,ca,脚趾角,助教,垂直力,Fz,响应模型与数据吻合。

应用校准映射悬挂模型
点击应用校准映射的悬挂模型.虚拟测试实验室使用响应模型来生成校准的悬挂和断点数据。
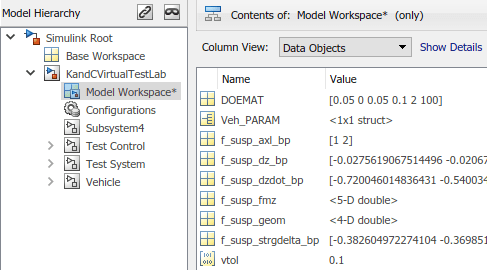
点击好吧更新模型工作区和悬挂块。
在Model Explorer中,您可以查看生成的悬挂参数。
| 参数 | 模型工作空间变量 | 描述 |
|---|---|---|
轴断点,f_sus_axl_bp |
|
轴断点,P,无量纲。 |
纵轴悬挂高度断点,f_sus_dz_bp |
|
垂直轴悬挂高度断点,米,用m表示。 |
垂直轴悬挂高度速度断点,f_sus_dzdot_bp |
|
垂直轴悬挂高度速度断点,N,单位为m/s。 |
纵轴悬架力和力矩响应,f_sus_fmz |
|
|
悬浮几何响应,f_sus_geom |
|
|
转向角度断点,f_sus_strgdelta_bp |
|
转向角断点,O,用rad表示。 |
从Simscape悬挂生成映射的悬挂
虚拟试验室使用基于模型的校准工具箱对悬架高度和手轮角工作点进行Sobol序列实验设计。在每个操作点上,参考应用程序都会激活Simscape多体一个频率范围为0.1到2hz的啁啾信号悬挂系统。虚拟测试实验室然后使用数据拟合悬架垂直力,倾角角,和趾角与高斯过程模型(GPM)作为悬架状态的函数。最后,参考应用程序使用GPM为悬挂块生成悬挂参数。
测试实验室使用中包含的DOE设置来测试悬架系统DOEMAT数组中。浏览DOEMAT数组值,打开模型资源管理器。
| 元素 | 描述 |
|---|---|
|
悬架高度 |
|
手轮角 |
|
啁啾信号振幅 |
|
启动啁啾频率 |
|
结束啁啾频率 |
|
仿真时间完成啁啾信号频率范围 |
生成需要一定的时间来运行,并降低其他计算机进程的速度。在MATLAB中查看进度®窗口。
在Model Explorer中,您可以查看生成的悬挂参数。
| 参数 | 模型工作空间变量 | 描述 |
|---|---|---|
轴断点,f_sus_axl_bp |
|
轴断点,P,无量纲。 |
纵轴悬挂高度断点,f_sus_dz_bp |
|
垂直轴悬挂高度断点,米,用m表示。 |
垂直轴悬挂高度速度断点,f_sus_dzdot_bp |
|
垂直轴悬挂高度速度断点,N,单位为m/s。 |
纵轴悬架力和力矩响应,f_sus_fmz |
|
|
悬浮几何响应,f_sus_geom |
|
|
转向角度断点,f_sus_strgdelta_bp |
|
转向角断点,O,用rad表示。 |
比较映射和Simscape悬挂响应
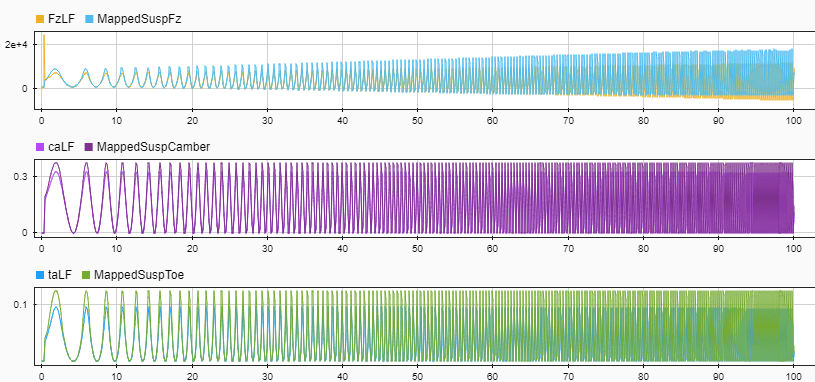
虚拟测试实验室刺激Simscape多体悬架在一个工作点,然后比较响应与映射悬架。
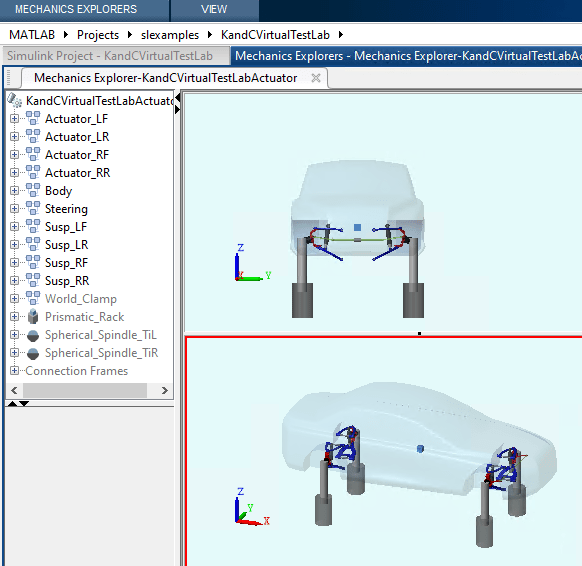
来刺激Simscape多体悬架模型,测试实验室使用的DOE设置中包含
DOEMAT数组中。在仿真过程中,要查看悬挂系统,请选择力学探险家选项卡。
仿真完成后,使用仿真数据检查器来比较映射的悬架和悬架的悬架系统响应Simscape多体悬架模型。例如,比较垂直力、弯曲角和脚趾角响应。


另请参阅
相关的话题
您也可以从以下列表中选择一个网站: