三维环境中的场景查询gydF4y2Ba
在Simulink中提供了带摄像机和光线追踪的场景查询参考应用万博1manbetxgydF4y2Ba®gydF4y2Ba与3D可视化环境的接口。有关运行参考应用程序所需的最低硬件,请参见gydF4y2Ba虚幻引擎模拟环境的要求和限制gydF4y2Ba.gydF4y2Ba
带摄像机和光线追踪参考的场景查询应用包括:gydF4y2Ba
一种具有简单传动系统、组合滑移轮和三维车辆动力学模型的乘用车。gydF4y2Ba
一个摄像头安装在乘用车的后视镜上。gydF4y2Ba
转向,加速,齿轮和制动控制。gydF4y2Ba
车灯控制。gydF4y2Ba
为虚拟Mcity场景配置的3D可视化环境。gydF4y2Ba
创建并打开相机和光线跟踪参考应用程序项目的工作副本。gydF4y2Ba
在运行模拟时,参考应用程序将提供此车辆和场景信息。gydF4y2Ba
| 窗口gydF4y2Ba | 描述gydF4y2Ba | ||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
AutoVrtlEnvgydF4y2Ba |
虚幻引擎的视频输出gydF4y2Ba®gydF4y2Ba三维可视化环境图像反馈。默认情况下,显示来自gydF4y2Ba模拟三维场景配置gydF4y2Ba块gydF4y2Ba场景视图gydF4y2Ba参数gydF4y2Ba 要平滑地更改相机视图,请使用以下关键命令。gydF4y2Ba
对于其他相机控制,使用这些关键命令。gydF4y2Ba
|
||||||||||||||||||||||||||||||||||
SDL视频显示gydF4y2Ba |
视频图像输出gydF4y2Ba模拟3D相机获取gydF4y2Ba块。默认情况下,显示由这些参数设置指定的视图:gydF4y2Ba
|
||||||||||||||||||||||||||||||||||



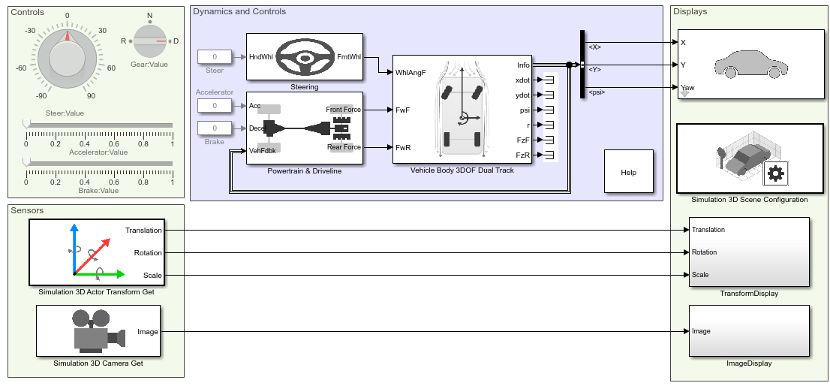
下表总结了参考应用程序的各个部分。gydF4y2Ba
| 的名字gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
控制gydF4y2Ba |
控制车辆转向、齿轮、加速和制动的刻度盘和仪表。刹车控制系统打开车辆的刹车灯。将档位控制设为R,车辆倒车灯将亮起。gydF4y2Ba |
传感器gydF4y2Ba |
的gydF4y2Ba模拟三维演员变换获取gydF4y2Bablock从3D可视化环境中返回车辆、乘用车和四个轮子的平移、旋转和缩放。gydF4y2Ba 的gydF4y2Ba模拟3D相机获取gydF4y2Ba块返回来自3D可视化环境的相机图像。默认情况下,该块返回由这些参数设置指定的相机位置的图像数据:gydF4y2Ba
|
动态与控制gydF4y2Ba |
与Simulink接口计算车厂和万博1manbetx控制器的动态响应。默认情况下,子系统包含一个简单的传动系统和gydF4y2Ba车辆3DOF双轨gydF4y2Ba块体车辆动力学模型。gydF4y2Ba 实现了一个灯光控制子系统,您可以使用它来控制大灯和信号灯。gydF4y2Ba
|
显示gydF4y2Ba |
的gydF4y2Ba模拟三维车辆与地面跟踪gydF4y2Ba块在三维可视化环境中实现了一个乘用车。该块使用车辆位置来调整车辆的仰角、滚转和俯仰,使车辆遵循地面地形。默认情况下,block具有以下参数设置:gydF4y2Ba
的gydF4y2Ba模拟三维场景配置gydF4y2Bablock配置虚幻引擎3D可视化环境。默认情况下,block具有以下参数设置:gydF4y2Ba
的gydF4y2BaTransformDisplaygydF4y2Ba子系统显示控件的平移、旋转和缩放gydF4y2Ba 的gydF4y2BaImageDisplaygydF4y2Ba子系统显示的视频图像输出gydF4y2Ba模拟3D相机获取gydF4y2Ba块在SDL视频显示窗口。gydF4y2Ba |

显示子系统gydF4y2Ba
TransformDisplay子系统gydF4y2Ba
在TransformDisplay子系统中gydF4y2Ba显示gydF4y2Ba块提供平移,旋转和缩放的车身和四个轮子。使用gydF4y2Ba常数gydF4y2Ba块值来控制显示。gydF4y2Ba
1gydF4y2Ba——翻译gydF4y2Ba2gydF4y2Ba——旋转gydF4y2Ba3.gydF4y2Ba——规模gydF4y2Ba
例如,要显示翻译信息,将值设置为gydF4y2Ba1gydF4y2Ba.gydF4y2Ba
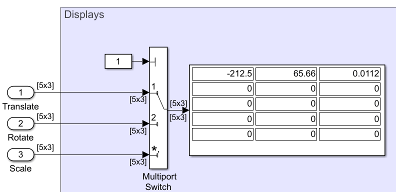
显示显示:gydF4y2Ba
车身位于gydF4y2Ba
-212.5gydF4y2Ba米,gydF4y2Ba65.66gydF4y2Bam,gydF4y2Ba0.0112gydF4y2BaM沿着世界gydF4y2BaXgydF4y2Ba-,gydF4y2BaYgydF4y2Ba- - - - - -,gydF4y2BaZgydF4y2Ba-轴,分别。gydF4y2Ba车轮在世界上处于初始位置gydF4y2BaXgydF4y2Ba-,gydF4y2BaYgydF4y2Ba- - - - - -,gydF4y2BaZgydF4y2Ba-轴,分别。gydF4y2Ba
的gydF4y2Ba显示gydF4y2BaBlock提供车辆和车轮位置的数组。gydF4y2Ba
车辆的平移和旋转是沿着世界坐标系轴进行的。gydF4y2Ba
车轮的平移和旋转是相对于它们的初始位置,沿世界坐标系轴。gydF4y2Ba
ImageDisplay子系统gydF4y2Ba
在ImageDisplay子系统中gydF4y2Ba二级MATLAB s函数gydF4y2Ba块使用gydF4y2BaVideoDisplayMSfcnWingydF4y2Ba函数显示视频图像输出gydF4y2Ba模拟3D相机获取gydF4y2Ba块。gydF4y2Ba
另请参阅gydF4y2Ba
模拟三维演员变换获取gydF4y2Ba|gydF4y2Ba模拟3D相机获取gydF4y2Ba|gydF4y2Ba模拟三维场景配置gydF4y2Ba|gydF4y2Ba虚拟McitygydF4y2Ba|gydF4y2Ba模拟三维车辆与地面跟踪gydF4y2Ba
相关的例子gydF4y2Ba
更多关于gydF4y2Ba
外部网站gydF4y2Ba
您也可以从以下列表中选择一个网站:gydF4y2Ba
美洲gydF4y2Ba
- 美国拉丁gydF4y2Ba(西班牙语)gydF4y2Ba
- 加拿大gydF4y2Ba(英语)gydF4y2Ba
- 美国gydF4y2Ba(英语)gydF4y2Ba
欧洲gydF4y2Ba
- 比利时gydF4y2Ba(英语)gydF4y2Ba
- 丹麦gydF4y2Ba(英语)gydF4y2Ba
- 德国gydF4y2Ba(德语)gydF4y2Ba
- 西班牙gydF4y2Ba(西班牙语)gydF4y2Ba
- 芬兰gydF4y2Ba(英语)gydF4y2Ba
- 法国gydF4y2Ba(法语)gydF4y2Ba
- 爱尔兰gydF4y2Ba(英语)gydF4y2Ba
- 意大利gydF4y2Ba(意大利语)gydF4y2Ba
- 卢森堡gydF4y2Ba(英语)gydF4y2Ba
- 荷兰gydF4y2Ba(英语)gydF4y2Ba
- 挪威gydF4y2Ba(英语)gydF4y2Ba
- 奥地利gydF4y2Ba(德语)gydF4y2Ba
- 葡萄牙gydF4y2Ba(英语)gydF4y2Ba
- 瑞典gydF4y2Ba(英语)gydF4y2Ba
- 瑞士gydF4y2Ba
- 联合王国gydF4y2Ba(英语)gydF4y2Ba
亚太地区gydF4y2Ba
- 澳大利亚gydF4y2Ba(英语)gydF4y2Ba
- 印度gydF4y2Ba(英语)gydF4y2Ba
- 新西兰gydF4y2Ba(英语)gydF4y2Ba
- 中国gydF4y2Ba
- 日本gydF4y2Ba(日本語)gydF4y2Ba
- 한국gydF4y2Ba(한국어)gydF4y2Ba