velodyneFileReader
读点云数据调速发电机PCAP文件
描述
的velodyneFileReader从调速发电机对象读取点云数据®数据包捕获(PCAP)文件。
创建
语法
描述
veloReader= velodyneFileReader (文件名,deviceModel)文件名和DeviceModel直接属性。读者支持VLP-16,万博1manbetx冰球LITE,冰球高分辨率,VLP-32C, HDL-32E,高密度脂蛋白- 64 e和vls - 128设备模型。
veloReader= velodyneFileReader (文件名,deviceModel,名称=值)OrganizePoints=真正的)返回一个有组织的点云。
属性
例子
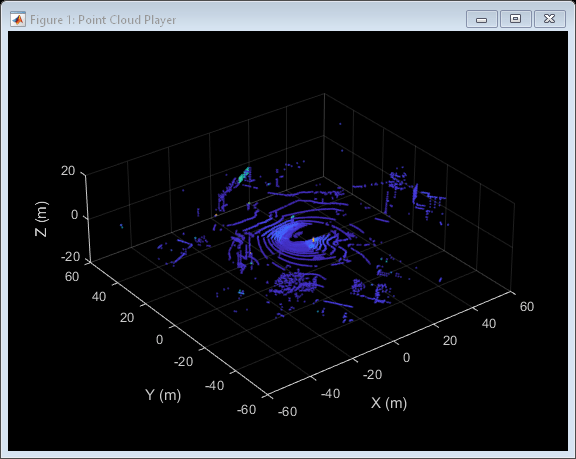
显示点云从调速发电机PCAP文件
使用velodyneFileReader阅读一个数据包捕获(PCAP)文件从一个调速发电机®传感器。观点云使用pcplayer。
读点云通过调速发电机®文件阅读器。指定PCAP文件阅读和调速发电机®设备模型。
veloReader = velodyneFileReader (“lidarData_ConstructionRoad.pcap”,“HDL32E”);
定义x - y -,和z -轴的限制pcplayer在米。标签的轴。
xlimits = 60 [-60];ylimits = 60 [-60];zlimits = 20 [-20];
创建点云的球员。
球员= pcplayer (xlimits ylimits zlimits);
标签的轴。
包含(player.Axes“X (m)”);ylabel (player.Axes“Y (m)”);zlabel (player.Axes“Z (m)”);
第一个捕获感兴趣的点云在0.3秒到文件。设置CurrentTime属性,时间被阅读点云。
veloReader。CurrentTime=veloReader。开始时间+ seconds(0.3);
显示点云流10秒钟。删除最后一个而显示完整的流条件。
使用hasFrame检查是否一个新的框架。遍历文件通过调用readFrame阅读的点云。使用点云播放器显示它们。删除最后一个而显示完整的流条件。
而(hasFrame (veloReader) & & player.isOpen () & & (veloReader。CurrentTime < veloReader。开始时间+ seconds(10))) ptCloudObj = readFrame(veloReader); view(player,ptCloudObj.Location,ptCloudObj.Intensity); pause(0.1);结束
版本历史
另请参阅
功能
对象
主题
- 激光雷达的工具箱支持硬件万博1manbetx(激光雷达工具箱)
- 调速发电机激光雷达传感器数据采集(调速发电机激光雷达传感器的激万博1manbetx光雷达的工具箱支持包)
- 从激光雷达数据建立一个映射