我也对这个问题的答案感兴趣,也许人更好地理解函数的详细说明它的工作原理如何?评论并不足够解释……
误判的Matlab R2018b新功能“pcsegdist”
15的观点(30天)
显示旧的评论
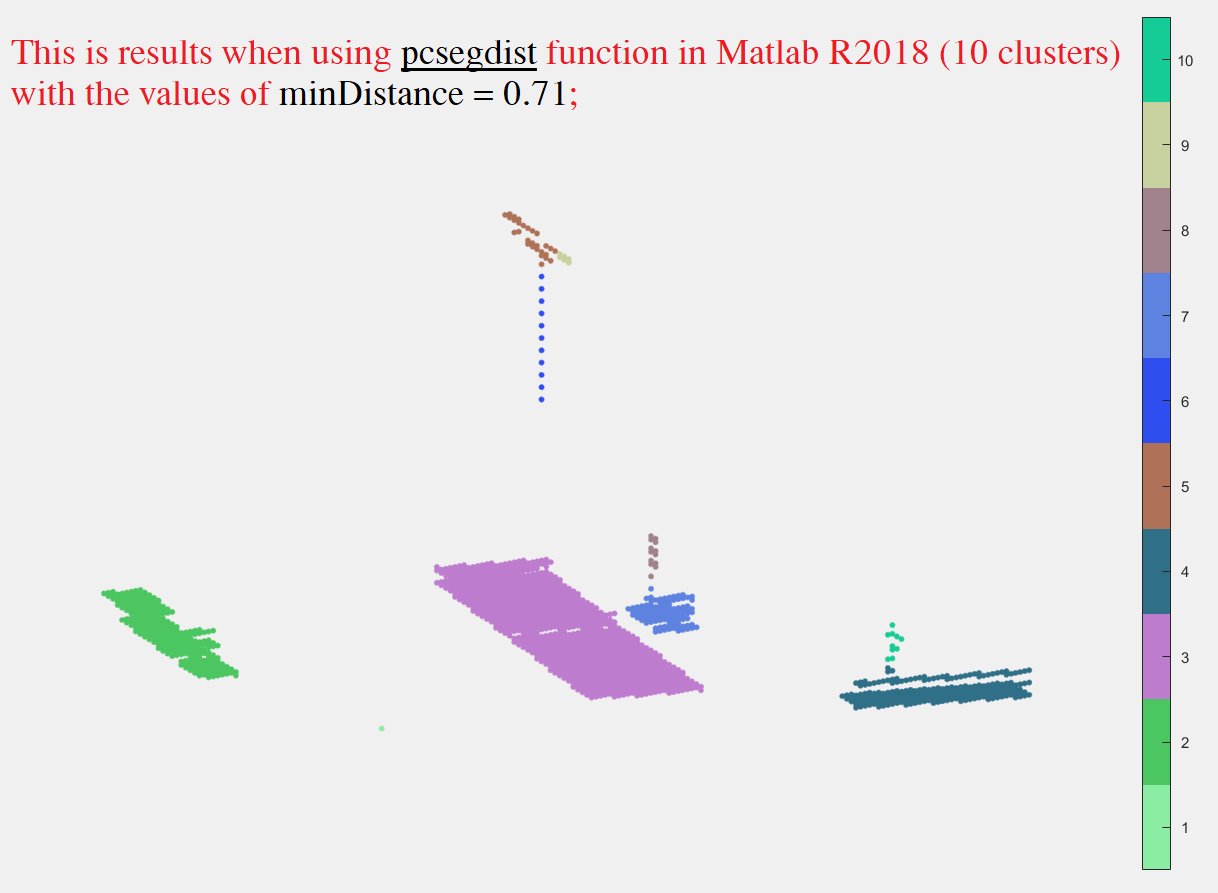
我试着测试新功能”
pcsegdist
“在Matlab R2018b。然而,结果是
错误的
基于欧氏距离的点云分割成集群
例子
我测试的3 d数据分- 1797分(请参阅附加测试。txt文件)。它指出,两个邻居点之间的最小距离是0.3736
抽搐
明确;clc文件名=“用法”;负载(“用法”);P =测试(:,1:3);% =获得数据坐标(x, y, z)的数据集“列”(所有行和列1、2、3)
ptCloud = pointCloud (P);
minDistance = 0.71;%这个值应该小于最小的3 d距离2集群
[标签,numClusters] = pcsegdist (ptCloud minDistance);% numClusters:集群的数量
%标签:kx1矩阵。这是每个体素在每个集群指数
toc
% %生成cell_cluster
cell_cluster = {}; x = P (: 1), y = P (:, 2); z = P (:, 3);
为我= 1:numClusters
cluster_i = [x(标签= =我),y(标签= =我)、z(标签= =我)];%调用x, y, z coord属于同一集群的所有点
cell_cluster{结束+ 1}= cluster_i;% (1 xk)细胞。k =数量的集群在哪里
结束
视图图;Plot_cell (cell_cluster); (3);%绘制结果集群(使用功能图)
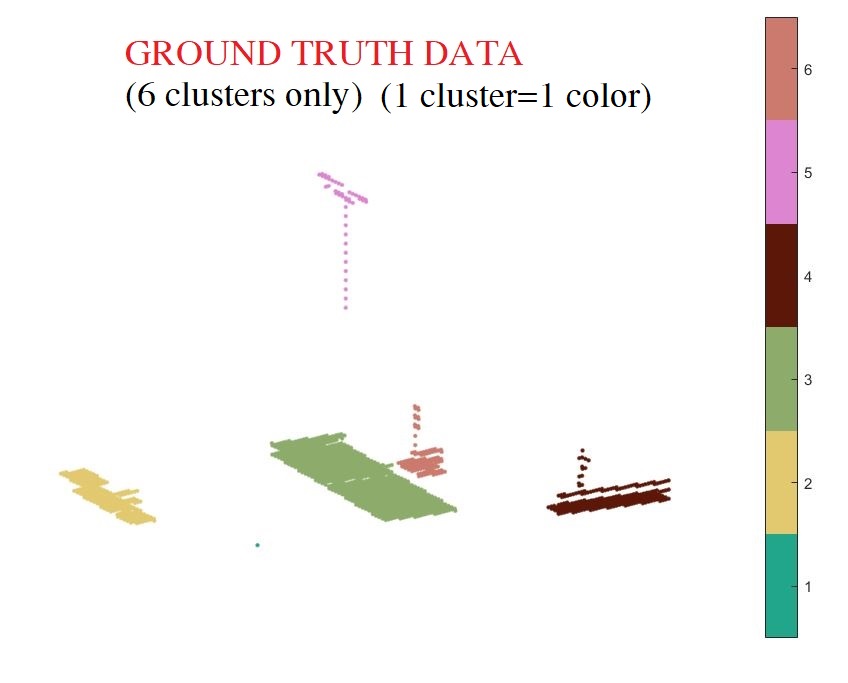
但是当我验证通过使用手工方法(地面实况数据),结果应该如下图:
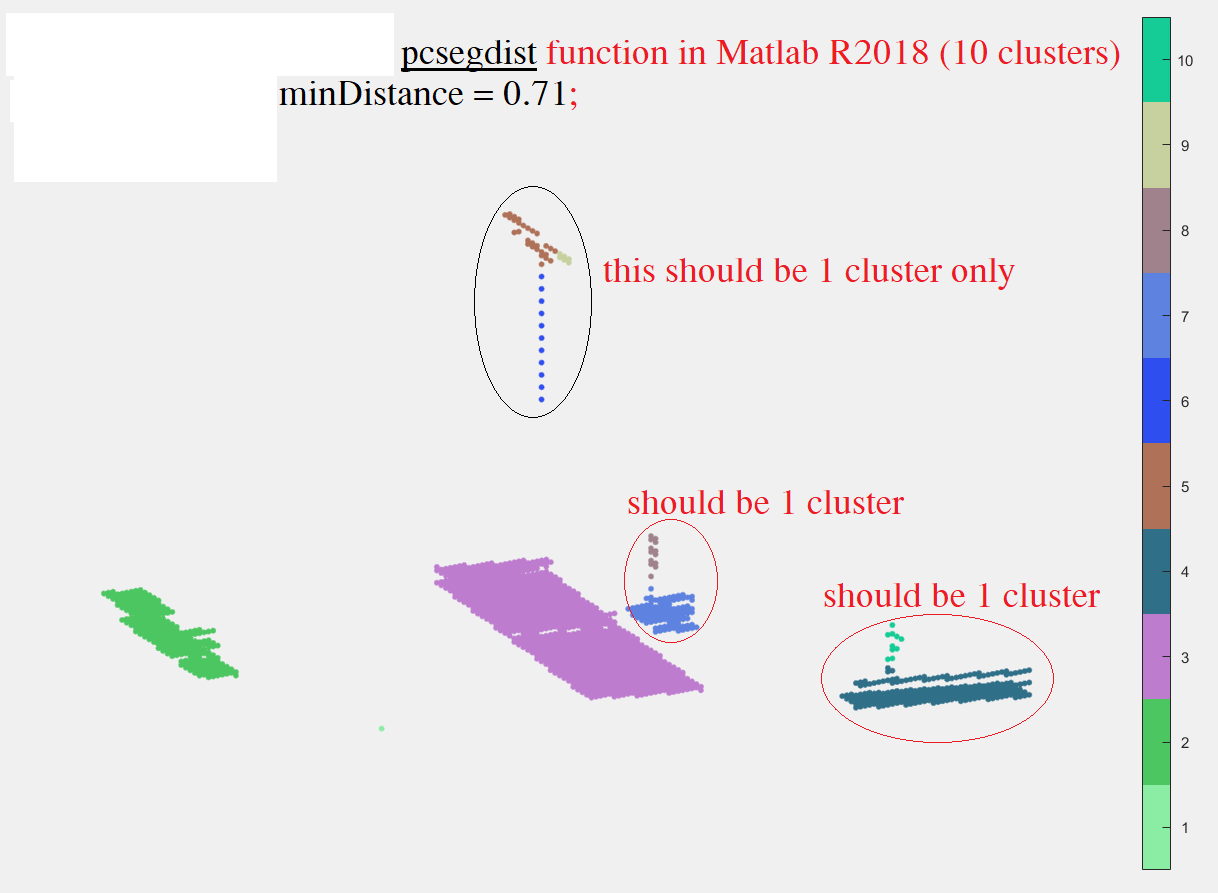
因此,我想知道关于新函数的结果”
pcsegdist
“在Matlab R2018b,还是我误解或错误的地方?
答案(0)
翻译的![]()
也seleccionar uno de来说《国家/语言: