自动化驾驶工具箱
Diseño,SimulaciónyPruebasde Sistemas de Asistencia Avanzada A LaConducción(Adas)Y deConducciónAutónoma

自动驾驶工具箱™比例算法和herramientas para diseñar,类似的辅助系统的可能系统为conducción (ADAS)和conducción autónoma。可能diseñar y probar sistemas de percepción de visión y LiDAR, así como controladores de fusión de sensorres, planificación de trayectorias y vehículos。在visualización están的herramientas的图表和镜报aérea的cobertura的传感器,探测器和seguimientos, así como visualizaciones para vídeo,激光雷达和地图。这个工具箱允许在这里的HD实时地图的重要数据和其他的OpenDRIVE®,AsíComoTrabajar Con艾略特。
Mediante La App Right Rabeler,ES Posible Automatizar El eTiquetado deValidación(地面真理)Para entrenar y evaluar los Algoritmos dePercepción。Para Pruebas硬件循环(HIL)YSimulacióndeScercepción,FusióndeSensores,PlanificacióndeRaycureriasyLógicade控制,Puede Aperentar Y Simular Escenarios deConducción。ES Posible Simular La Salida de SensoresdeCámara,雷达ylidar en en entorno 3d fotorrealista,Asícodeccionesmediante sensores de objetos ylímitesdeCoril en Un Entorno deSimulación2.5d。
自动化驾驶工具箱Proporciona ejegros de aplicaciones de参考资料agaionionades habituales de Adas yConducciónAutónoma,包括套房,AEB,ACC,LKA Y Estacionamiento。Esta Toolbox Soporta LaGeneracióndeCódigoC/ C ++ Para El ProtipadoRápidoYLASPruebas Hil,Y Acmite Algoritmos De Control deFusióndeSensores,Seguimiento,PlanificacióndeRaycontiasyVaTayculos。
介绍


Deteccióndevevículosy carrites en laaplicacióndeferenciadel sistema depercepción视觉。
Simulación de conducción立方
Genere DeteccionesSintéticasAParirdeMockosde Sensores de RadarYCámara,E Incorpore esas eSas eSas Detecciones en Escenarios deConducciónpara probarlos algoritmos deconducciónutónomacon uni simulador basado en comoides。Defina Redes de Carreteras,Sactores Y Sensores Mediante La App Drive Scenario设计师。Importe Pruebas de Eureorcap Y Redes de Carreteras de OpendrivePrediseñadas。

Simulación场景conducción虚幻引擎
Desarrolle,在simulación的3D generado媒介虚幻引擎中,你可以看到算法的可视化®de史诗般的游戏®。

Usando联合国Entorno deSimulación3D帕拉注册商Datos de SensoresSintéticos,Desarrolle联合国SISTema deDeteccióndeSeñalizacióndeShuebeSESESEEMAen Diferentes Escenarios。
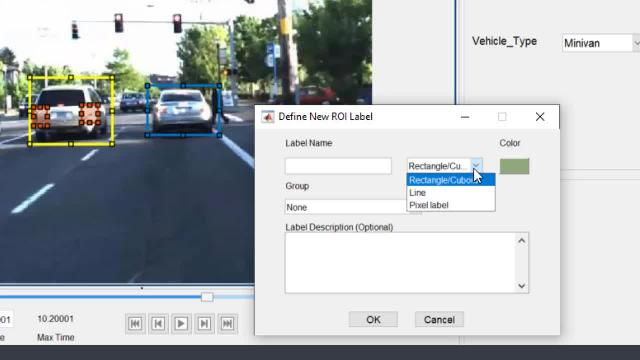
AutomatizacióndeltiquetadodeValidación(地面真理)
利用洛杉矶应用地面真理贴标贴标贴埃尔吉罗斯互联网互动yiomatizado a fin de facilitar ladeteccióndeobjetos,lasegmentaciónsemánticay laclasificaciónde escenas。
percepción的算法
evalúeel rendimiento de los algoritmos depercepciónmediante lacompacióndelosdeys deValidación(地面真理)Con Las Salidas de Los Algoritmos。
.")
Evaluación de la salida de detección de cariles con respoto a datos de validación (ground-truth)。
diseñode sistemas deVisión
Desarrolle Algoritmos deVisión人造Para LaDeteccióndeverículosy涂料,LaDeteccióndeCarrilesY LaClasificación。

Salida de lasimulacióndefensisdeCámara单眼。
procesamiento de lidar.
利用Datos de Lidar Para Detectar Themmentar Los Planos de Tierra。

Detección y seguimiento de vehículos在puntos的nubes de puntos激光雷达。

VisualizacióndeLoseutryAdos de lafusiónde传感器。
Acceso A Datos De Hat HD Live Map
Lea Los Datos de Mapas del Servicio网页HD HD Live地图,包括Las Capas de Mapas En Mosaico Que ContienenInformióndalladaSobreCarreteras,Carres YUbicación。

Uso de here HD Live Map Para Verificar Las Configuraciones de Carriles。
Visualización de datos de mapas
在los的possiones的vehículos mientras se mueven的流的协调。

Visualizacióndedeosde mapas en流。

Planificación y visualización de la trayectoria de conducción en un entorno 3D

Controlador横向斯坦利Para CalcularLosÁngulosde Giro。
Etiriquetado deValidación(地面真理)MultiSeñal
EtiqueteSeñalesdelidaryvídeosincronizadas同时
Etiquetado de激光雷达
帝力龙头·普敦·莱达·帕拉·埃罗格拉特型号深入学习
Personalización de escenas 3D
Simule Escenarios deConducciónNen联合国Entorno 3D Usando Escenas Creadas en El Editer de Unreal
传感器激光雷达
Genere Nubes de PuntosSintéticasapartucciónprogramados
Mejoras en el visor de vista aérea
visual alice datos de radar y LiDAR de sensors de simulación 3D y visualalice los actors desde bloques personalizados
Carreteras de Here HD Live Map En Escenarios
Creecoenarios deConducciónuterizododatos de Carreteras Importados de mapasgeográficosdealtadefileción
咨询Las.Notas de laVersiónPara Saber Los Detalles Sobre estas Funcionionadades Y Las Funciones对应者。