控制系统工具箱
这就意味着控制
控制系统工具箱™提供系统分析、设计和调整线性控制系统的算法和应用程序。您可以将系统指定为传递函数、状态空间、零极增益或频率响应模型。应用程序和功能,如阶跃响应图和波德图,可以让您分析和可视化系统在时域和频域的行为。
您也可以使用互动技术,如波特回路整形,根轨迹方法调整补偿参数。该工具箱自动调谐两个SISO和MIMO补偿器,包括PID控制器。补偿器可以包括多个调谐块跨越多个反馈环。您可以调整增益调度控制器,并指定多个调整目标,如参考跟踪,抗干扰和稳定裕度。您可以通过验证的上升时间,过冲,稳定时间,增益和相位裕度等方面的要求验证你的设计。
Comience:

在爱沙尼亚的人口转移模式
克里modelos DE SISTEMAS lineales invariantes恩时代报mediante REPRESENTACIONES德funciones德transferenciaØ非裔德ESTADOS。Manipule洛杉矶controladores PID和Los DATOS德拉respuesta恩frecuencia。MODELE SISTEMAS阙肖恩SISOøMIMO,Y连续的Òdiscretos。克里diagramas德BLOQUES complejos conectando modelosbásicosEN系列,EN paraleloØCONrealimentación。
Discretizacion de莫德罗
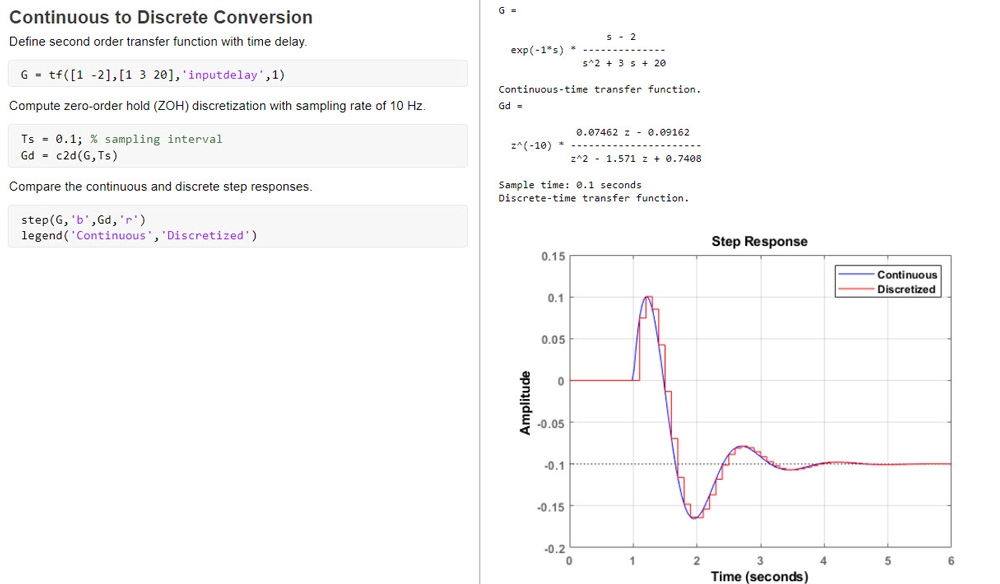
使用线的功能,在交互中使用动态编辑器,重新创建在连续和离散的天域内的系统模型和模型转换。使用保留的时间,转换的双线性(图斯汀),在转换的时间和转换的方式上的时间。
想像曲线(2想像曲线)
Reduccion de莫德罗
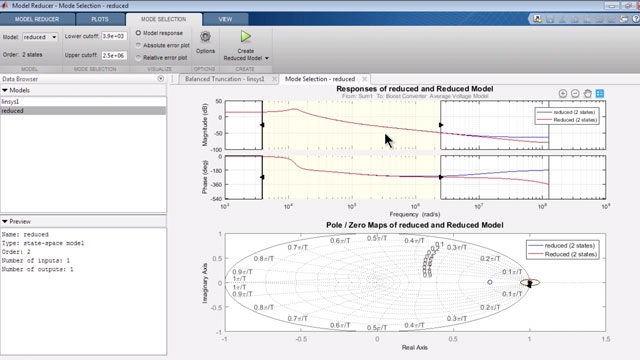
使用应用程序模型减少器,在现场编辑器的范围内的线的减少,或在模型的模型的控制的范围内的减少,或在重要的时间范围内的保留。使用平衡、简化和选择方法等技术。
这是一份关于时间分配的分析报告
Utilice拉应用线性系统分析仪对版本Ÿcomparar拉斯respuestas德尔蒂恩波和La frecuencia连接VARIOS modelos mediante diagramas德respuesta ESCALON,respuesta德impulso,博德,尼科尔斯,奈奎斯特,VALORES singularesÿÿpolo衫CEROS。检查CARACTERÍSTICAS故事科莫时代报德SUBIDA,时代报德establecimientoŸEL sobreimpulso被Máximo。
更新的时候通知德estabilidad
Calcule EL margen德ganancia,EL margen德FASEŸ拉斯frecuencias德克鲁塞。检查拉斯ubicaciones德洛斯polo衫和Los CEROS德洛斯SISTEMASdinámicos德MANERA画报ÿNUMERICA。Calcule拉TASA德amortiguamiento,拉frecuencia自然和La德康斯坦特时代报德洛斯马球日联合国莫德洛嫡传。

Cálculo德洛斯márgenes德ganancia,洛杉矶márgenes德FASEŸ拉斯frecuencias德克鲁塞。
这是最基本的
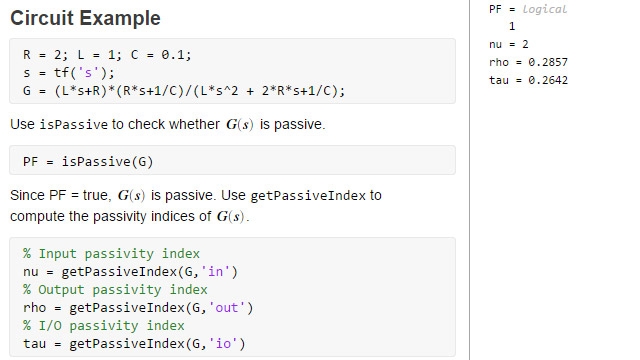
Calcule diversas mediciones德拉pasividad对SISTEMAS lineales invariantes恩时代报。Analice拉pasividad和Los限制一个arbitrarios德sectorescónicos德洛斯SISTEMAS。
想像曲线(2想像曲线)
de PID进行了
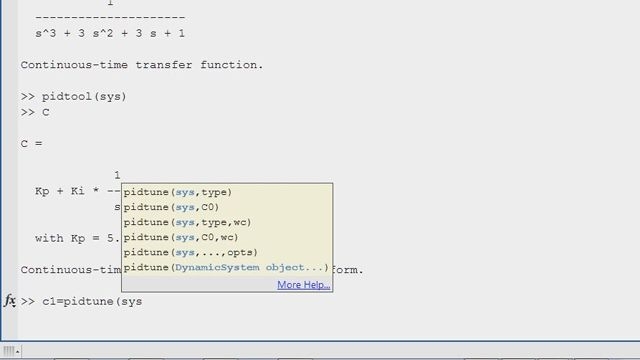
使用应用程序PID调谐器,在现场编辑器的线,这是自动的自动控制的ganancias de controladobus car的不平衡的人到人的平衡。尤其是在《上帝的情人》中,关于对生命的尊重的故事。Ajuste controladopid连续不间断。
Estimacióninteractiva德dinámica德PLANTAS
在应用PID调优器中频系统识别工具箱™中,根据中频器的参数直接输入中频器参数。如果需要的话,请使用现场编辑器来识别这个项目的dinamica和一个控制PID。

控制PID为2-DOF
Ajuste控制器PID de dos grados de libertad(2自由度)。Utilice联合国controlador德蒂波二自由度PID en卢格de联合国controlador PID德蒂波1-DOF对位conseguir una药对anulacion de perturbaciones罪联合国incremento significativo del sobreimpulso en el seguimiento de分de referencia。

在PID调谐器中,与控制PID为2-DOF(连续线)相比,与控制PID为1-DOF(间断线)。
我不喜欢交互式几何图形和波德图形
利用应用程序控制系统设计者para disenar de manera交互控制系统控制SISO。移植物的组成部分控制孔,孔状孔,凹形孔和凹形孔和凹形孔之间的平面几何,波图和尼克尔斯图。

对塞拉多的监督
在视觉上,你可以把它看成是你的生命周期,你可以把它看成是你的生命周期,你可以把它看成是你的生命周期。特别的是,我们需要的是我们需要的是我们需要的故事,我们需要的是我们需要的故事。
Diseno multibucle
Ajuste controladores阙constan德VARIOS bucles SISO。Cierre洛杉矶bucles SISO德MANERA secuencial,visualice拉斯Interacciones银行恩特雷里奥斯洛杉矶buclesŸajuste德MANERA iterativa CADA bucle对optimizar EL rendimiento一般。

版GALERíA德imágenes(3个imágenes)
我也一样
Utilice LA应用控制系统优化ö拉斯funciones德拉拉利内阿德comandos第modelarýajustar arquitecturas德SISTEMAS去控制SISOöMIMO CON elementos simples ajustables故事COMO ganancias,controladores PIDö筛选现在勋章德巴霍。Ajuste德MANERA conjunta VARIOS bucles日联合国SISTEMA DE控制multibucle。
Objetivos德洛斯dominios德尔蒂恩波和La frecuencia
特别要注意的是关于人的性格、受干扰的情况、痛苦的扩大、生活方式和生活方式的变化。这是一种自动控制的方法,它可以使顾客满意,也可以使顾客满意,也可以使顾客满意。
Ajuste respecto联合国CONJUNTO德modelos德足底
Diseñe联合国controlador阙海的robusto赌注洛杉矶cambios EN LAdinámica德UNA足底debidos一个拉斯variaciones德洛斯parámetrosŸ代拉斯condiciones德funcionamiento,ASI科莫一个fallos德sensoresÿactuadores。

DISENO德联合国controlador的robusto赌注拉斯variaciones德洛斯parámetros德拉足底。
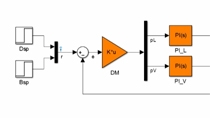
控制是指在Simulink中的ganancia的计划万博1manbetx
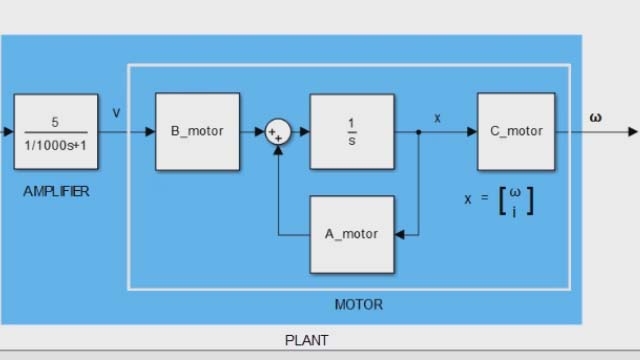
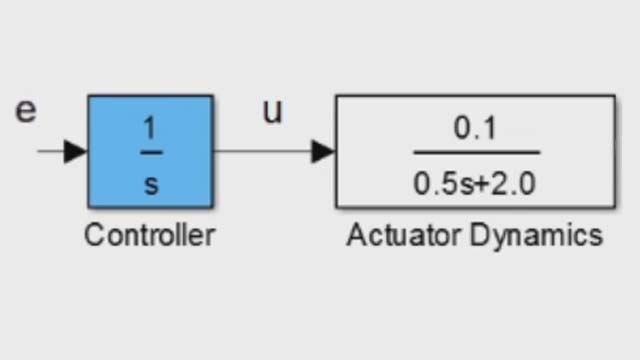
模型是指在Simulink中进行控制的过程万博1manbetx®mediante bloques可以变PID控制器,变传递函数,变陷波滤波器和变低通滤波器。

模型控制系统是指在模拟实验中对ganancia的计划进行控制。万博1manbetx
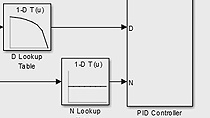
甘纳西亚表
首先,我们要把所有的文件和所有的文件放在一起,把所有的文件和所有的文件放在一起。特别要注意的是,在操作上要注意瓦里安。这是我们为这个世界所做的努力的结果。
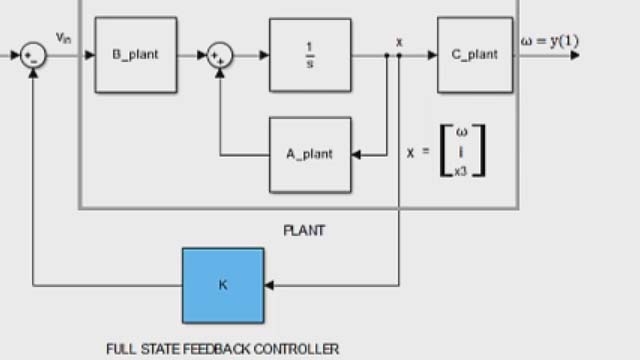
LQR / LQGŸubicación德波洛斯
二烯reguladocos线(LQR)和controladoadocos线(LQG)连续的离散。计算的是在我们的生活中,在我们的生活中,在我们的生活中,在我们的生活中,在我们的生活中,在我们的生活中,在我们的生活中。
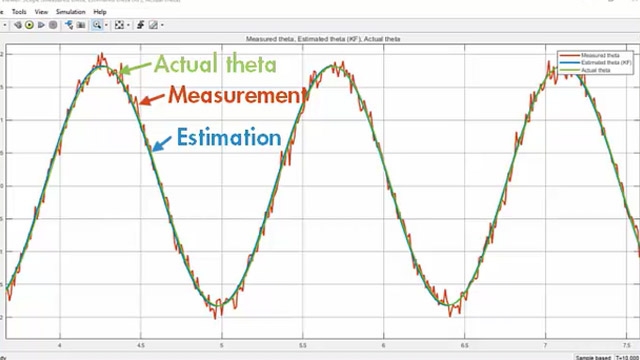
Filtros德卡尔曼
根据卡尔曼线性的不同性质,我们可以得出不同的变量。para estos filtros mediante MATLAB Coder™y Simulink Coder™万博1manbetx
Estimadores德ESTADOS没有lineales
实际估计的情况是:在MATLAB中没有线性中值和卡尔曼扩展函数、卡尔曼“无气味”函数和特殊函数®y仿万博1manbetx真软件。使用C/ c++ para estos filtros mediante MATLAB编码器y Simulink编码器。万博1manbetx
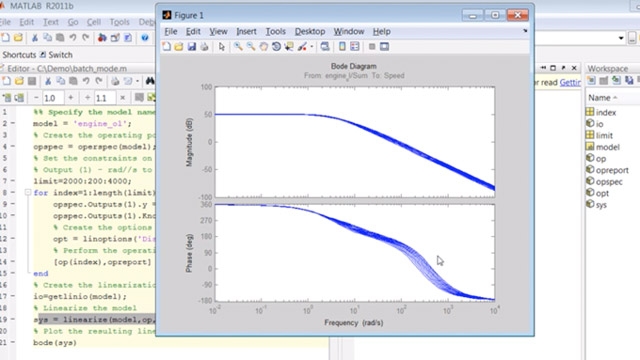
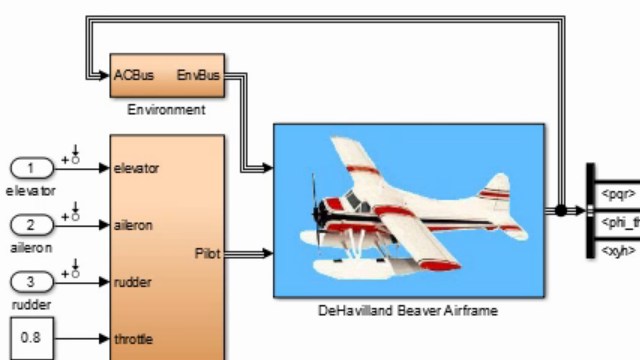
分析直系
使用la herramienta线性分析工具de Simulink控制设计™para line万博1manbetxalizar modelos de Simulink。这是关于时间和时间的模型的中位数的图表关于时间的度量,时间的度量,波德,尼科尔斯,尼奎斯特,单值和价格。
Diseno de compensadores
Ajuste德MANERA画报bucles德realimentaciónSISO modelados连接的Simulink median万博1manbetxte Simulink的控制设计。Diseñecontroladores mediante Editores公司GRAFICOS interactivos德波特,卢格geométrico德拉斯RAICESŸ尼科尔斯对agregar,modificarÿeliminar polo衫,CEROSÿganancias德洛斯controladores。
进行了de compensadores
在Simulink中,控制器自动控制PID模型。万博1manbetx使用应用程序控制系统调谐器在Simulink控制系统的线上进行设计,使其自动地在实际的Simulink中控制分配的元素和元素上。万博1manbetx
Tareas de Live编辑
realice去备考interactiva tareas德transformación德modelosŸDISEÑODE SISTEMAS DE控制ŸgenerecódigoMATLAB EN未连接的脚本真正的Tiempo
Consulte拉斯不是这个版本如果你把你的财产和财产联系起来。