模型预测控制工具箱
Diseñe y模拟控制者预测模型

模型预测控制工具箱™proporciona funciones,Una应用程序y bloques de simulink万博1manbetx®para diseñar y simular controladores predictivos de modelos (MPC)。为植物的生长、生长水平和生长限制提供了特殊的模型。如果你有类似的症状,请评估你的病情。
我们可以在ejecución的期限内,用我们的货币来限制。对非直系植物进行控制,应采用适应性强的MPC。应用程序可以使用这个程序rápidas,可以使用这个程序预测模型explícito可以使用这个程序的一部分,可以使用这个程序solución。
Para el prototipado rápido y la implementación de sistemas embidos, esta toolbox es compatible con la generación de código C y de texto estructurado IEC 61131-3。
科莫empezar:

Diseño de MPC en MATLAB
使用功能在línea的comandos para diseñar控制MPC。确定一种内部植物模型,调整价格,其他的限制在parámetros控制下,也可以对控制下的植物进行评估。

Diseño de controladores MPC en la línea de comandos。
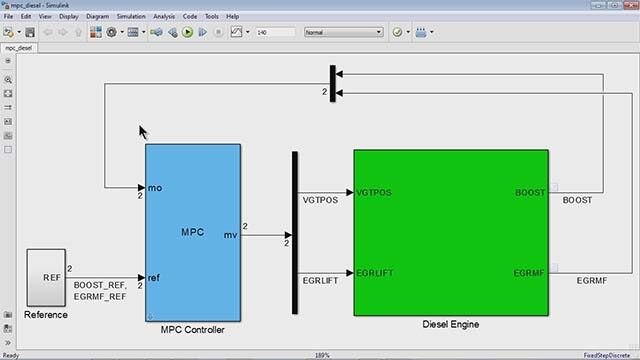
Diseño de MPC en 万博1manbetxSimulink
在Simulink中,MPC控制器和其他控制器的模型模拟控制器可以使用一个万博1manbetx工具箱。在Simulink控制设计™中,记录线性的Simulink模型,计万博1manbetx算线性不变的时间内的植物模型,计算中间植物的名义价值。
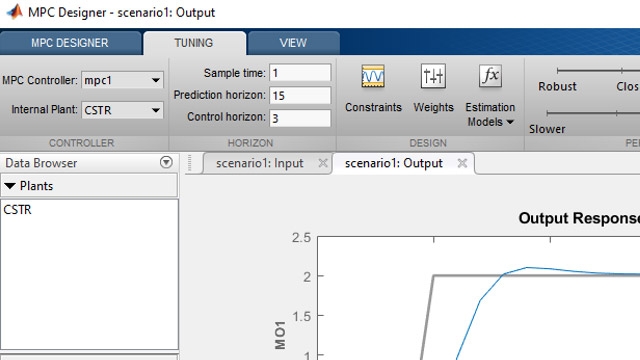
APP MPC Designer.
Diseñe控制器MPC de manera interactiva definendoUn Modelo de Planta Interno你的地平线在哪里,你的限制在哪里。在simulación的中间情况下,对控制有效。比较不同控制者MPC的最后再现。

Bloques predefinidos
利用LOS BLOQUES自适应巡航控制系统,车道保持辅助系统Y路径跟随控制系统COMO PUNTO DE PARTIDA PARA SU APLICACINIONAN ADAS Y Personalice ELDiseñoSegúnLoQue Necesite。GenereCódigodesde Los Bloques预先菲尼斯帕拉·贝斯韦尔洛斯控制领域MPC。

我们要预先定义Simulink的diseñar系统来控制自适万博1manbetx应。
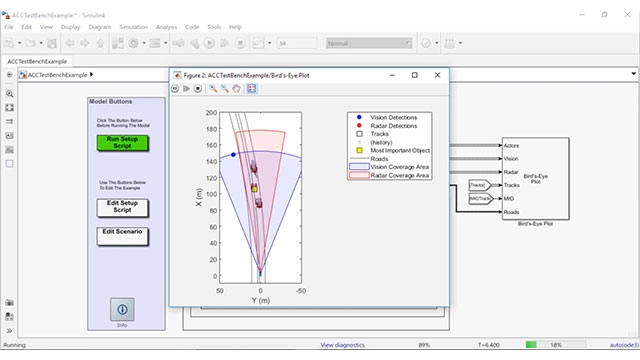
Aplicaciones de referencia
我们可以在参考资料中使用它,例如guían a través在参考资料中使用它,例如diseñar在参考资料中使用它,例如conducción autónoma。我们可以参照también le muestran cómo我们可以参照我们的制度,我们可以参照我们的忠诚。
MPC Lineal.
Diseñe un controlador MPC linear especificando a modelo de planta interno sistema linear invariable en el timo (LTI) desde Control System Toolbox™,o linealizando modelo de Simulink con万博1manbetx Simulink Control Design。También puede importar un modelo creado a partir de datos medidos de entrada y salida mediante System Identification Toolbox™。

EspecificacióndeMocalode Planta Interno Para UnDiseñoDeMPCLineal。
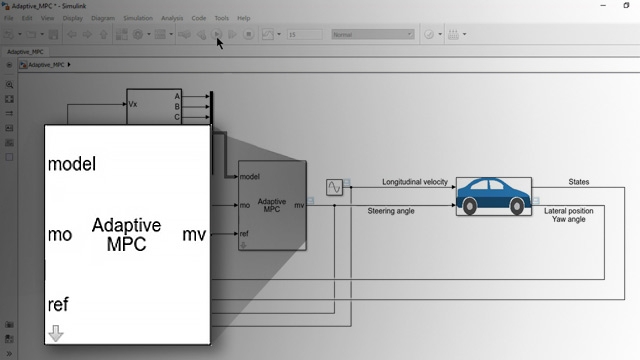
MPC adaptativo
Diseñe y simplecontroladores MPC adaptivativos mediante funciones en la línea de comandos y el block Adaptive MPC Controller。实际上,植物的模式是通过cálculo或proporcióneselo来控制的。使用过滤Kalman线性时间变量(LTV)合并garantía de estabilidad asintótica para la estimación estado在模型适应的预测控制。
MPC con planificación de ganancia
Controle Plantas No Lineales en Una Amplia variedad de Condiciones deOperaciónConeLBloque多MPC控制器。Disceñe联合国控制员MPC帕拉CADA Punto Operativo Y Cambie De Controlador en Tiempo deEjecución。
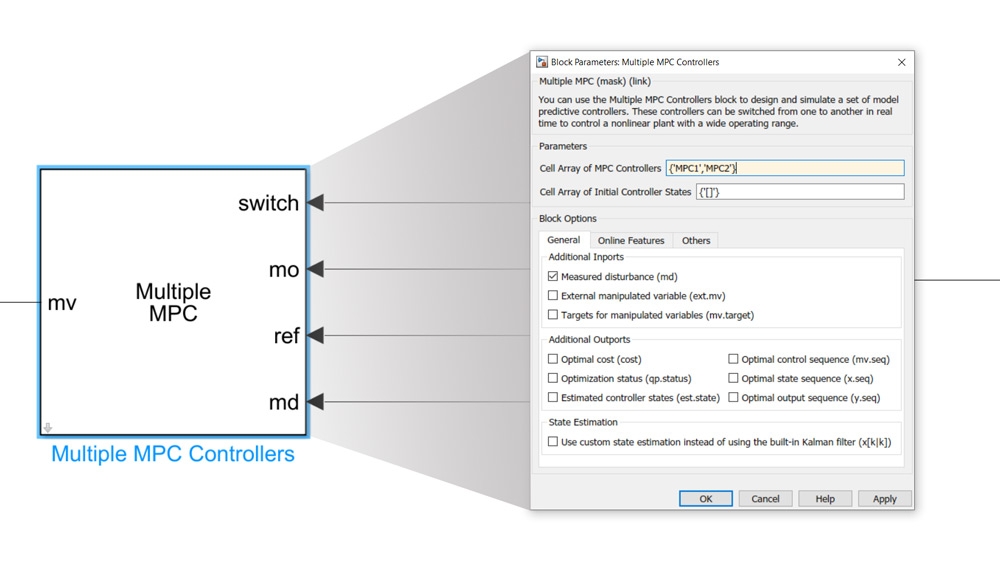
USO Del Bloque多MPC控制器ParaDiseñarControladoresMPC ConPlanicacióndeGanancia。
Parámetrosdel Controlador.
Después定义内部planta模型,完成diseño控制程序MPC的具体时间,predicción控制程序的水平,escala的因素,出口和出口比索的限制。Esta工具箱también兼容的限制条件和限制条件在时间内的变量。
Especificación de los parámetros del controlador en la app MPC Designer。
估计德尔斯塔多
这是我们公司的一部分,也是我们公司的一部分。También puede utilizar la opción de estimación del estado personalizada必要的比例价值估计与算法personalizado al controlador。

Estimación del estado personalizada。
修订del diseno
检测可能存在的问题,并在控制器MPC中安装función和diagnóstico的比例工具箱。我们可以用我们的账户diagnóstico,我们可以用我们的账户。diseño,我们可以用我们的账户ejecución。
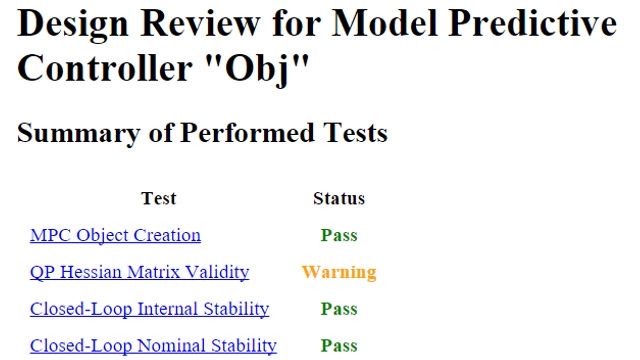
Mejora del diseño del controlador siguiendo las recommendation ones del notify de revisión del diseño。
Ajuste deparámetrosen tiempo deejecución
调整在ejecución的控制器和MPC的时间内的限制,以便在ejecución的时间内进行优化,并在必要时对diseñar的实现者进行调整。在MATLAB和Simulink中实现控制器的实时调整。万博1manbetx

在ejecución的时间内调整比索限制。
MonitedizacióndelRendimientoen Tiempo deEjecución
我们可以通过señal和optimización来发现可能的情况,我们可以通过optimización来决定我们是否可以利用我们来控制重新行动。

Detección我的时间是真实的。
MPC explicito
Genere un controlador explícito a part de un diseño MPC implícito。简化控制器explícito generado,还原记忆。

WeneracióndeNodgeadadorMPC ExpliceCito APartícitoPeviaMente的PartícitoScondipmente。
Solucion aproximada (suboptima)
Diseñe,模拟你的情况控制你的MPC的时间empo de ejecución garantizado en el peor de los casos mediante una solución aproximada (subóptima)。

Comparación de los tiempos de ejecución de una solución óptima y otra aproximada (subóptima)。
Planificacion最适条件
使用控制者的MPC没有线性的适用于planificación óptima要求一个模型没有线性的成本限制没有线性的。

Optimización的trayectoria的控制一个机器人volador中间的MPC没有线性。
控制de retroalimentacion
对没有线迹的植物的模拟控制与没有线迹的限制相比。Por defecto, los controladores MPC no lineales utilan Optimization Toolbox™para resolver el problem de programación no lineales。También具体的程序求解器没有直系个性化。

Control Predictivo de Modelos No Lineal de Un反应堆QuímicoExotérmico。
MPCEconómico.
Diseñe控制器MPC económicos最优控制器función成本任意限制没有线性任意。您可以使用一个模式predicción直系的或无直系的,一个función的成本没有直系的个性化限制,没有直系的个性化。

控制MPCEconómicodeLaProduccióndeóxidodeetileno。
GeneracióndeCódigoConMatlab Y Simu万博1manbetxlink
Diseñe联合控件MPC en Simulink Y G万博1manbetxenereCódigoC Y Texto EstructUrado IEC 61131-3 Mediante Simulink Coder™O Simulink PLC Coder™尊重。利用MATLAB Coder™Para Perentarcódigoc en matlab ydespliéguelopara控制en tiempo真实。TambiénPuedeUtherizar Matlab编译器TM值para desplegar控制器MPC。

Generación de código C是一个分块MPC控制器。
解算器embebido
generere código desde el solver de programación cuadrática (QP) proporcionado para conseir una implementación efficiente en un procesador embebido。请参见código generado en número arbitrary de proceadores。Utilice el solver QP proporcionado con la formulación MPC estándar o utilícelo para resolver problem de MPC personalizados。

Controlador MPC personalizado。
解算器QP personalizado
使用一个求解器programación cuadrática (QP) personalizado de su elección para la simulación y la generación de código。
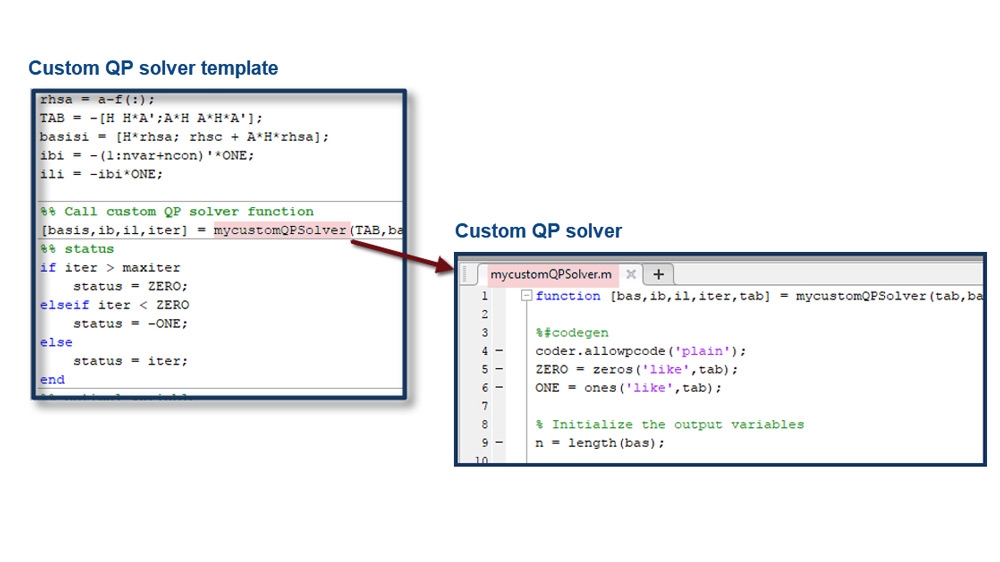
解决QP personalizado simulación y generación de código。
无直系血友病对照
generalcódigo para controladompc没有线性效用的求解器在预先确定的算法SQP
解决QP de punto内部
diseñe e实现控件的MPC效率适用于在predicción y控件的水平方向上的限制
咨询Las.Notas de laVersiónPara obtener详细说明了对应的函数。