模型預測控制工具箱
Diseñe y模拟控制者预测模型
模型预测控制工具箱™比例函数,在Simulink中应用万博1manbetx®para diseñar相似的控制者中位数控制预测模型(MPC)线性的和非线性的。这个工具箱允许特殊的植物生长模式,水平模式,限制模式。请评估塞拉多病人的病情。
我们可以在ejecución的期限内,用我们的货币来限制。Esta工具箱比例解决方案optimización desplegables y también允许使用个性化解决方案。对无直线性的植物进行控制,对MPC适应性的实施控制,对无直线性的植物进行控制。申请可以通过rápidas,工具箱允许一般的预测者explícito部分的正常实施者solución近似。
Para el prototipado rápido y la implementación de sistemas embidos, including ido el despliegue de solvers de optimización, esta toolbox soporta la generación de código C y de texto estructurado IEC 61131-3。
Más información:


Documento tecnico gratuito
Implementación在Simulink上的控制器万博1manbetx
应用程序MPC设计器
Diseñe控制器MPC de manera interactiva definendo国际植物模型你的地平线在哪里,你的限制在哪里。在simulación的中间情况下,对控制有效。比较不同控制者MPC的最后再现。
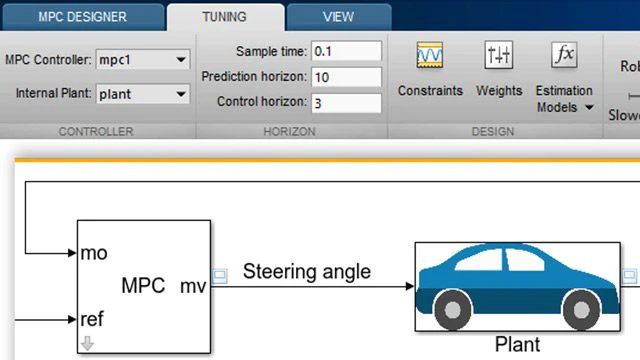
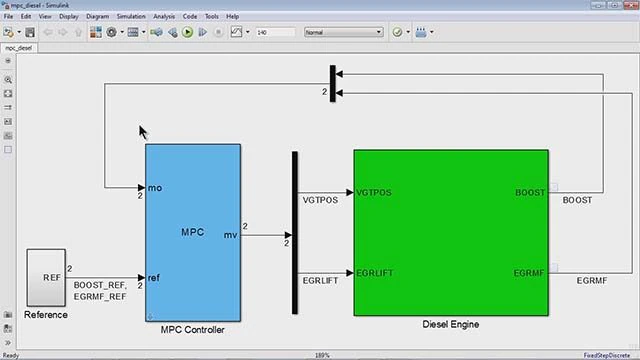
Diseño de MPC en 万博1manbetxSimulink
在Simulink中,MPC控制器的模型模拟控制器和其他控制器的模型模拟控万博1manbetx制器在工具箱中。用Simulink模型记录直线,用计算模型计算时间内直线不变的内部万博1manbetx植物模型,用MPC计算中间植物的名义价值万博1manbetxSimulink控制设计™.
Diseño de MPC en MATLAB
使用功能在línea的comandos para diseñar控制MPC。确定一种植物内部模式,并调整los pesos,以及parámetros控制器的限制。对患者的病情进行评估。

Diseño de controladores MPC en la línea de comandos。
Bloques predefinidos
实用的los bloques自适应巡航控制系统、车道保持辅助系统和路径跟踪控制系统,以及必要的个人信息。布洛克将军预先定义了维希库洛的绝望。

我们预先确定了原油适应控制系统的模拟。万博1manbetx
也就是使用参考资料的人
因此,我们可以把我们的应用程序和参考程序结合起来,把我们的目标放在diseñar上,把我们的MPC结合起来,放到conducción autónoma上。参考文献的应用程序también muestran cómo我们的理论和实践的不同之处是不同的。

线性的
Diseñe un controlador MPC linear especificando a modelo de planta interno como a sistema linear invariable en el timempo (LTI) creado Control System Toolbox™,o bien linealizando modelo de Simulink 万博1manbetxcon Simulink Control Design。También puede importar un modelo creado a partir de datos medidos de entrada y salida mediante System Identification Toolbox™。

国际植物模型特别适用于直系MPC疾病。
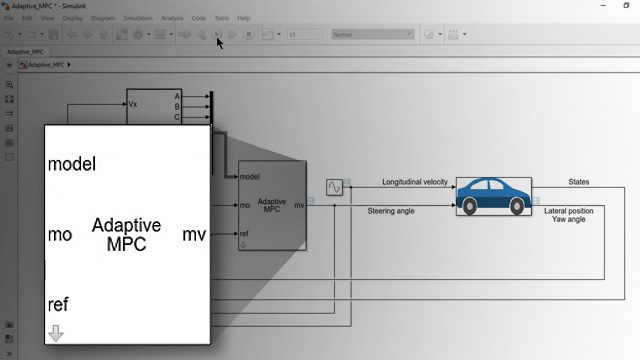
MPC adaptativo
模拟控制系统支持MPC自适应功能,适用于comandos和el bloque自适应MPC控制器。实施工厂和工厂的模式,并按比例进行控制。利用卡尔曼线性方差滤波器(LTV)集成控制系统的可预测性和模型适应性。
MPC con planificación de ganancia
采用多种MPC控制器,在操作条件下对植物进行控制。Diseñe联合国管制员和货币政策委员会的工作人员和管制员的时间是ejecución。

Uso del block Multiple MPC Controllers para diseñar controladores MPC con planificación de ganancia。
控制者
Después定义内部planta模型,完成diseño控制程序MPC的具体时间,predicción控制程序的水平,escala的因素,salida和peso的限制。在这个工具箱también里有兼容的限制条件,在这个时间里有可变比索的限制条件。

Especificación de los parámetros del controlador en la app MPC Designer。
Estimación del estado酒店
这是我们公司的一部分,也是我们公司的一部分。También您可以使用一种个性化的算法对estado进行估计。

Estimación del estado personalizada。
修订del diseno
检测可能存在的问题,并与MPC联系función de diagnóstico公司。我们可以在diagnóstico para ajustar los pesos y las restricciones durante el diseño del controlador y evitar fallos en time empo de ejecución。

Mejora del diseño del controlador siguiendo las recommendation ones del notify de revisión del diseño。
调整parámetros en tiempo ejecución
货币政策委员会(MPC)在重新实施货币再贴现(rediseñarlo)的必要条件下,对欧洲经济一体化进行了优化。MATLAB环境下的控制系统®科莫在仿真软件。万博1manbetx

在ejecución的时间内调整比索限制。
Supervisión del rendimiento en tiempo de ejecución
我们可以在señal的estado的optimización中发现我们可以在optimización中发现不收敛的情况。我们可以通过información来作出明智的决定。

蒂埃姆波雷亚尔法洛斯控制中心。
MPC explicito
总的联合国控制机构MPC解释了联合国MPC的一部分,以实现平等。简单化的联合国控制机制解释了记忆的简化。

联合国控制总干事MPC解释了联合国控制的一方在执行前的承诺。
Solucion aproximada (suboptima)
Diseñe,模拟你的情况,MPC con tiempo de ejecución garantizado en el peor de los casos usando una solución aproximada (subóptima)。

Comparación de los tiempos de ejecución de una solución óptima y otra aproximada (subóptima)。
Planificacion最适条件
使用控制者的MPC没有线性的适用于planificación óptima要求一个模型没有线性的成本限制没有线性的。

Optimización de trayectoria y control de un robot volador mediante MPC no linear。
反营养控制系统
在没有线的情况下,植物的塞拉多植物的控制系统与没有线的限制系统是相同的。根据预先确定的形式,控制者利用优化工具箱解决programación没有线性的问题。También具体的程序求解器没有直系个性化。

Sistema de control predictivo de modelos no linear de un reactor químico exotérmico。
经济管理委员会
控制权的解除使MPC经济最优化,控制权的行使限制了无线性的任意性。使用线性或非线性预测模型,实现成本非线性个性化和限制非线性个性化。

Sistema de control MPC económico para la producción de óxido de etileno。
MATLAB y Simulink中的código通用万博1manbetx
Diseñe un controlador MPC en 万博1manbetxSimulink y genere código Co texto estructurado IEC 61131-3 mediante Simulink Coder™o Simulink PLC Coder™,分别。Utilice MATLAB Coder™para generar código C en MATLAB y despliéguelo para sistemas de control en timempo real。También puede utilzar MATLAB Compiler™para empaquetar y comppartir su controlador MPC como una aplicación independent。

Generación de código C是一个分块MPC控制器。
积分求解器
generere código desde los solvers de programación cuadrática (QP) de conjunto activo de punto interior proporcionados para lograr implementación efficiente en procesadores embebidos。Para problems no lineales, utilice el solver programación cuadrática secuencial (SQP) de Optimization Toolbox Para similar y generar código。请讲código generado en a cantidad de procesadores que ee。

解决integrados。
解决personalizados
Utilice los solvers QP y NLP (programación no linear) FORCES PRO de埃博泰克拟合一般código拟合MPC线性和无线性的控制。最好的方法是使用类似于código的方法来解决QP和NLP个性化问题。

解算器QP需要模拟和通用。