y MATLAB仿万博1manbetx真软件
帕拉robotica
自由自治系统的概念和思想可以使我们在完美的现实中实现。

在机器人研究中,我们利用MATLAB和justar算法进行Simulink模拟,建立了真实的通用编码的模型,以便在软件中实现。万博1manbetx
Con MATLAB y 万博1manbetxSimulink podra:
- 控制机器人我用这个算法。
- Desarrollar算法独立于硬件y conectar反对机器人操作系统(ROS)。
- Conectar初步高级精算师根据数据的不同,我们需要控制这些数据。
- 创造手册编纂本产品是一种用于微型控制器、fpga、PLCs、gpu、VHDL/Verilog、texto estructurado (ST)和CUDA的自动生成平台。
- Conectar反对硬件de bajo coste, como Arduino y Raspberry Pi,硬件预订量的中位数。
- 简化和修正的观点法典的中位数是属于普通的。
- 遗传的障碍有一个关于机器人的集成存在。
你和机器人上的所有人都一样

简化后,在Simulink上完成了在机器人中值的MATLAB中计算交通工具和导航工具的范围。万博1manbetx我们明确地演示了一个自主的机器人可以单独的组成部分:一个路径,一个车辆的模型和一个路径的算法。
给时会:
这是一种产品的版本是necesitara ydescargue el莫德罗。







我要做决定
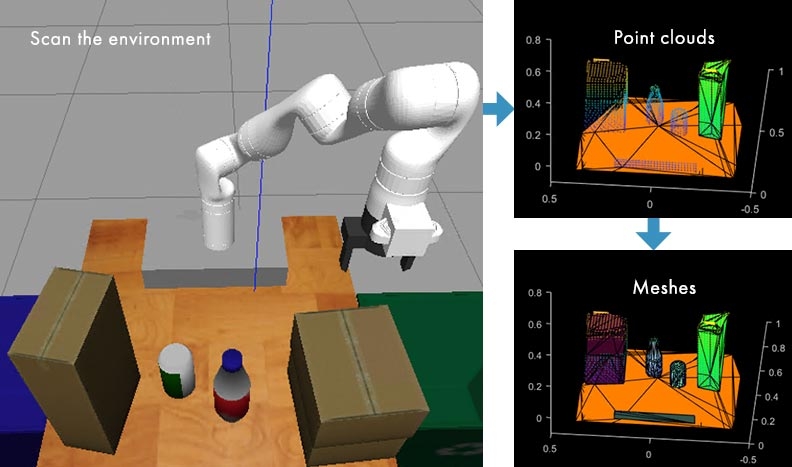
你可以把激光雷达的传感器应用到技术上用MATLAB实现局部化的同时mapeo (SLAM)(23)。
我们应该重新确定运动轨迹的平面计算的中庸。请把你的地图放在你的地图上。
我们可以允许一个机器人在一定的范围内用于决策,并且可以和其他机器人合作。实施这一原则是必须在决策过程中才能确定的。
Explorar或含




共同的平台和抛出的原因
这份公报提出了各种不同的传输协议的平台,包括CAN协议和802.11协议。使用数字技术,包括硬件兼容协议,蓝牙,TCP/IP, UDP, I2C, SPI和MODBUS。
通过MATLAB Simul万博1manbetxink,我们可以使用一个关于控制算法、数据分析、数据分析等方面的Simulink来模拟人类的疾病交替。这种整合减少了引入错误的可能性的全部可能性"
约翰·温博士,伦斯勒理工学院




数学顾问的助理
如果你在MATLAB软件的Simulink上有过类似的经验,你就可以把它作为你的初步经验,并把它作为你的公司的参考资料。万博1manbetx把联合国的个人计划和个人计划结合起来。就个人生活而言,在整个透明的环境下,我们的目标是控制整个过程,我们的目标是控制整个过程,我们的目标是控制整个过程。

感激你
Treinta已经开始探索了。

如果这个preguntas ?
可以在机器人上使用。
