Student Competition: Mobile Robotics Training
The training materials in this video series will enable your team to get started with designing and simulating common mobile robotics algorithms in MATLAB and Simulink. You will learn how to design open and closed loop feedback control systems for your robot to perform tasks like dead reckoning, line following and obstacle detection. You will also understand how to use the custom simulation tools to test your algorithms within Simulink before deploying them to an actual robot.

OverviewThese training materials will help your team get started with designing and simulating mobile robotics algorithms using MATLAB and Simulink.
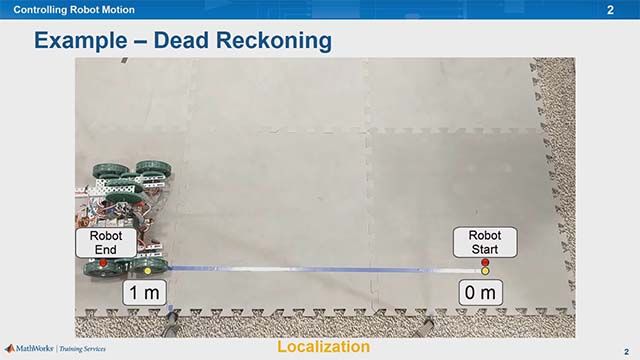
Part 1: Controlling Robot MotionLearn how to control a robot to move on its wheels autonomously using dead reckoning.
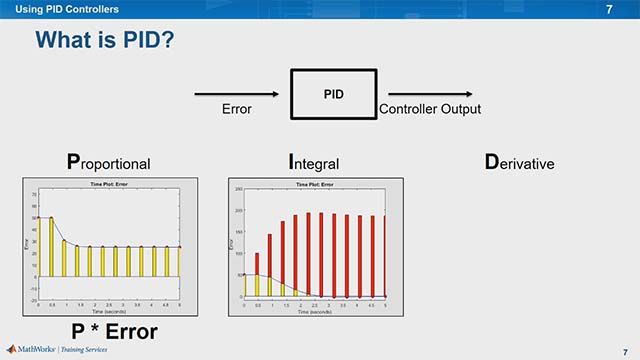
Part 2: Using PID ControllersLearn how to design and tune a PID controller to perform navigation tasks like dead reckoning.
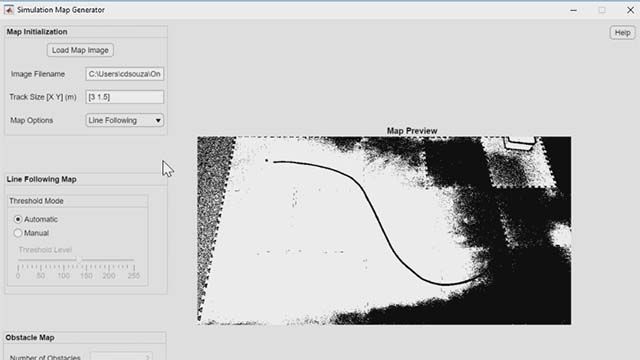
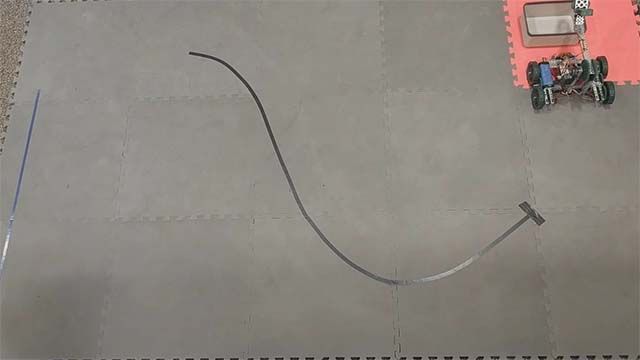
Part 3: Designing Line Following AlgorithmsLearn how to design line folllowing algorithms for a mobile robot.
Part 4: Designing Obstacle Detection AlgorithmsLearn how to design obstacle detection algorithms for a mobile robot
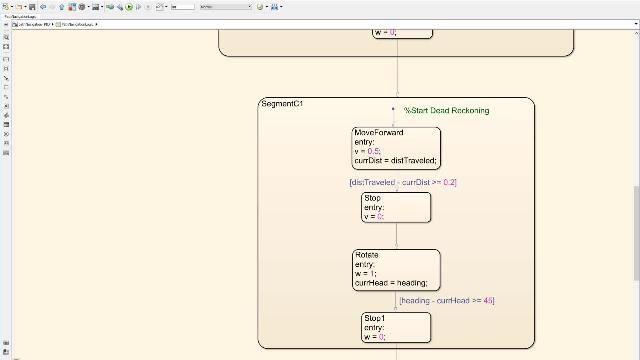
Part 5: Performing a Sequence of Path Navigation TasksLearn how to design a supervisory logic that navigates a robot through a predefined path.
Related Resources
You can also select a web site from the following list:
Americas
- América Latina(Español)
- Canada(English)
- United States(English)
Europe
- Belgium(English)
- Denmark(English)
- Deutschland(Deutsch)
- España(Español)
- Finland(English)
- France(Français)
- Ireland(English)
- Italia(Italiano)
- Luxembourg(English)
- Netherlands(English)
- Norway(English)
- Österreich(Deutsch)
- Portugal(English)
- Sweden(English)
- Switzerland
- United Kingdom(English)
Asia Pacific
- Australia(English)
- India(English)
- New Zealand(English)
- 中国
- 日本Japanese(日本語)
- 한국Korean(한국어)