跟踪驱动循环错误
这个例子展示了如何使用驱动循环来源块识别驱动周期的缺点当您运行传统的汽车应用程序的引用ftp - 75驾驶循环。
打开传统车辆参考应用程序项目。默认情况下,应用程序有一个
项目文件打开一个可写的位置。ftp - 75驱动周期误差跟踪禁用。打开驱动循环来源块。在故障追踪选项卡上,选择这些参数:
使故障跟踪
使故障跟踪
检查参数指定故障和失败条件。如果车速不容许速度范围内时宽容,块设置故障状态。接受默认EPA测力计开车计划通过点击参数设置好吧。
这个表提供了EPA标准的设置和全球统一轻型汽车测试程序(WLTP)实验室测试。
参数 描述 设置 EPA标准1
WLTP测试2
速度宽容
速度容忍度高于最高点和最低点以下驱动周期的速度跟踪的时间内宽容。
2.0英里
2.0公里/小时
时间的宽容
时间块用来确定速度宽容。
1.0秒
1.0秒
最大数量的错误 最大数量的缺点在驾驶周期。
未指定 10 最大单一故障时间 最大的故障持续时间。
2.0秒 1.0秒 最大总故障时间 在故障条件下最大积累时间。
未指定 未指定 连接车辆纵向速度信号驱动循环来源块
VelFdbk输入端口。在可视化子系统连接纵向速度信号,
< xdot >,外港命名xdot_output。确定
< xdot >信号单元。显示信号单元,调试选项卡上,选择信息覆盖>单位。的< xdot >单位是m / s的信号。选择
< xdot >信号线路和启用数据日志记录。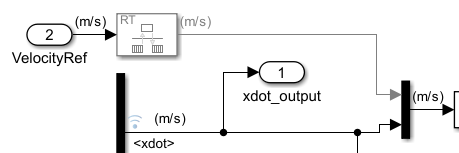
的顶层模型,可视化的输出连接到驱动循环块输入来源。

连接驱动循环来源块
信息一个终结者的端口输出端口。支持数据日志记录。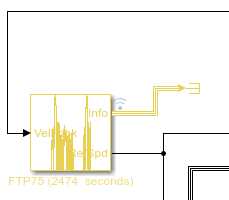
保存模型和运行模拟。
检查员检查结果,使用数据。在仿真软件万博1manbetx®将来发布,模拟选项卡,在审查结果,点击数据检查。
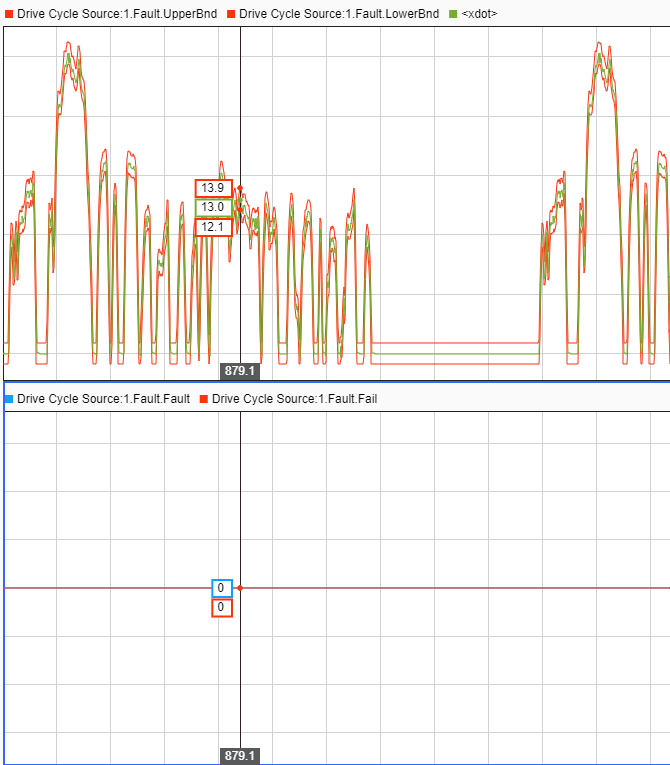
这些结果表明,驱动循环来源块没有检测错误或失败在驾驶周期。
的错——车辆速度,< xdot >,呆在允许速度范围的上界和下界。失败——故障条件没有超过最大数量的缺点,最大单一故障时间、最大总故障时间。
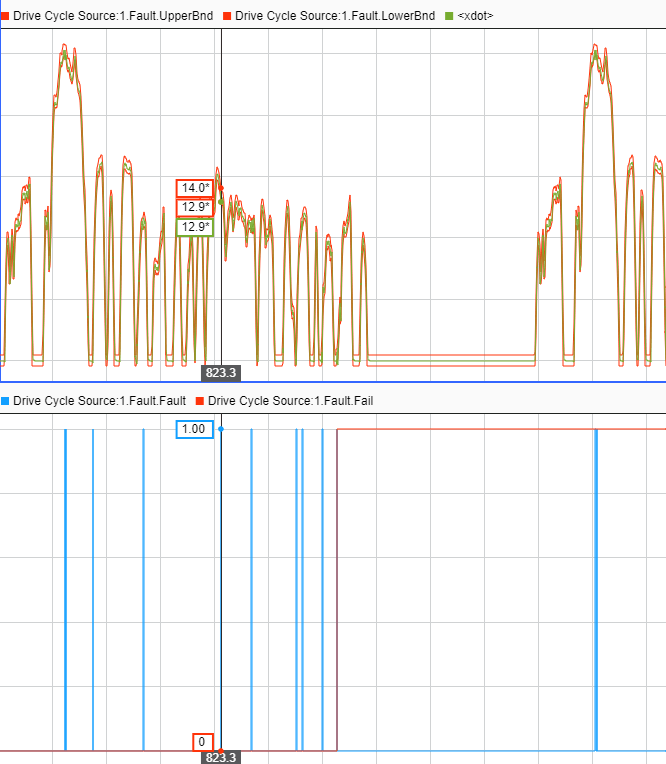
在驱动循环来源块,设置速度宽容更严格的公差参数,例如1英里。块计算新的速度误差范围。
重新运行模拟。
检查员检查结果,使用数据。这些结果表明,驱动源块周期检测失败和缺点在驾驶周期。
的错——车辆速度,< xdot >没有留在容许速度范围的上界和下界。失败——故障条件超过了最大数量的缺点,最大单一故障时间、最大总故障时间。





引用
[1]环境保护署(EPA)。EPA城市测力计驾驶时间表。40 CFR 86.115 -78年,2001年7月1日。
欧盟委员会[2]。“速度跟踪公差”。欧盟委员会监管。32017 r1151, Sec 1.2.6.6, 2017年6月1日。