段
对每个段的段数据和估算模型
语法
segm =段(z,nn)[segm, V,三卤甲烷,R2e] =段(z, nn, R2, q, R1, M, th0, P0,噢,μ)
描述
段构建AR,ARX或ARMAX / ARMA类型的型号,
假设模型参数随着时间的推移是分段常量。它导致一个模型,该模型将数据记录分成模型保持恒定的段。函数模型可能经历突变变化的信号和系统。
输入输出数据包含在z,这是一个iddata.对象或矩阵Z = [y u]在哪里y和u是列向量。如果系统有多个输入,u有相应的列数。
这个论点NN.定义模型顺序。对于ARMAX模型
n = [na nb nc nk];
在哪里NA.,NB., 和NC.是相应多项式的阶数。看到什么是多项式模型?.此外,NK.是延迟。如果模型有几个输入,NB.和NK.是行向量,给出了每个输入的顺序和延迟。
对于ARX模型(nc = 0.) 进入
nn = [na nb nk];
对于时间序列的ARMA模型
z = y;n = [na nc];
以及AR模型
nn = na;
输出参数segm是一个矩阵吗kTh行包含与时间对应的参数k.这类似于recursiveARX和RecursiveArmax.估计。输出参数三卤甲烷的段包含尚未分段的相应模型参数。每一排三卤甲烷包含相应时刻的参数估计。这些估计是将的参数加权在一起形成的米(默认值:5)不同的时变模型,随着参与模型在每次步骤时更改。考虑段当您对连续跟踪单个模型的参数变化不感兴趣,但需要检测系统动力学中的突然变化时,作为在线估计命令的替代。
输出参数V包含分段模型预测误差的平方和。这是市场细分成功与否的一个衡量标准。
输入参数R2是假设的创新方差e(t)。的默认值R2,R2 = [],是估计的。然后输出参数R2e是一个矢量kth元素包含估计值R2当时k.
这个论点问是该模型在任何给定时间展示突然变化的概率。默认值是0.01.
R1为参数跳变发生时的假设协方差矩阵。默认值是单位矩阵,其维数等于估计参数的个数。
米是算法中使用的并行模型的数量(见下)。其默认值为5.
th0是参数的初始值。它的默认为零。P0.为参数的初始协方差矩阵。默认值是单位矩阵的10倍。
二是每个模型的保证生活。也就是说,任何创建的候选模型都不会被废除直到至少二时间步骤。默认为我= 1.亩在估计方案中是否使用了遗忘参数R2.默认为0.97.
您选择的最关键参数是R2.有一个合理的猜测通常更可靠R2比估计它。通常,您需要尝试不同的值R2并评估结果。(参见下面的例子。)sqrt (R2)对应于该值的变化y(t),没有显示系统或输入可能已更改。
例子
将正弦波分割成恒定电平段
为模拟模型输出创建一个正弦曲线。
y = sin([1:50] / 3)';
指定输入信号常量1.
u = 1(大小(y));
指定模型的估计噪声方差。
R2 = 0.1;
对信号进行分段,并对每个分段估计一个ARX模型。使用简单模型 , 在哪里 是描述估计输出分段常数水平的模型参数, .
segm = segment([y,u],[0 1 1],R2);
检查结果。
情节([segm y])
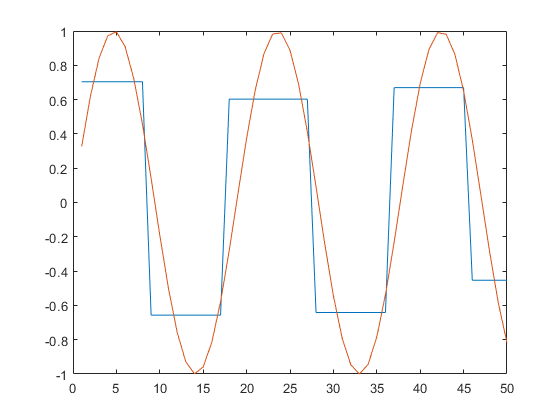
改变…的价值R2来改变估计的噪声方差。减少R2增加为这个模型生产的段的数量。
模型使用分割时延迟突然变化
加载并绘制估计数据。
负载iddemo6m.mat.zz = iddata(z(:,1),z(:,2));情节(z)
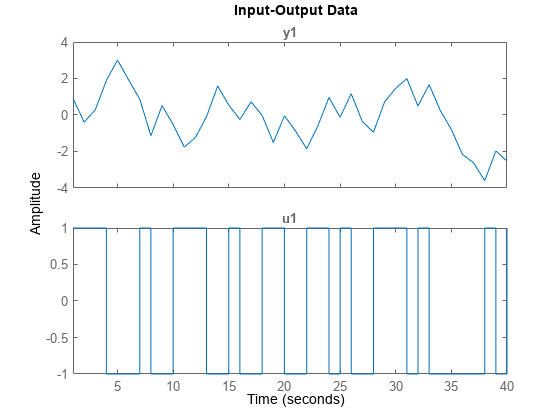
此数据包含从中延迟的变化2来1(这是难以检测数据来检测数据。
指定模型顺序来估计ARX模型的形式:
Nn = [1 2 1];
对数据进行分段,并估计每个分段的ARX模型。的估计噪声方差0.1.
SEG =段(Z,NN,0.1);
检验分段模型的参数。
情节(SEG)传奇(“一个”,“b1”,“b2”);
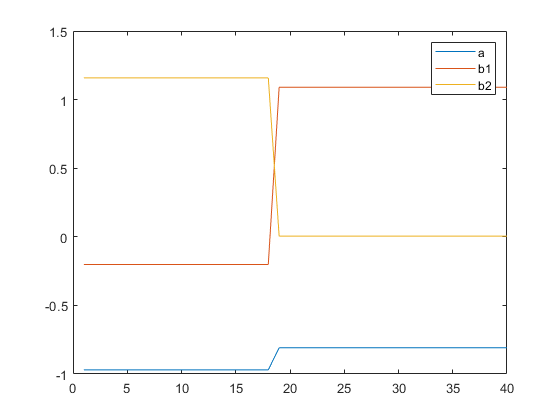
数据被分为两部分,这可以从样本号19前后模型参数的变化看出。的增加b1,以及相应的减少b2,显示模型延迟的变化。
限制
段与…不相容马铃薯®编码器™要么Matlab Compiler™.
算法
该算法基于米并行模型,每个递归估计由卡尔曼滤波类型的算法。每个模型独立更新,计算其后验概率。时变估计三卤甲烷通过加重在一起形成米权重等于后验概率的不同模型。每一次,模型(在那些至少存在过的模型中)都会步进二具有最小后验概率的样本)被取消。在假设系统参数随概率变化的情况下,建立了一个新的模型问,随机跳跃的模型中最有可能。参数更改的协方差矩阵设置为R1.
在检查所有数据之后,跟踪后概率最高的存活模型以及标记跳跃的时间实例。这定义了数据的不同段。(如果在算法中没有废除模型,则这将是跳转实例的最大似然估计。)分段模型segm然后通过平滑参数估计来形成,假设跳转实例是正确的。换句话说,选择在段的最后估计来表示整个段。
另请参阅
主题
您还可以从以下列表中选择一个网站: