音叉的结构动力学
执行音叉的模态和瞬态分析。
音叉是U形梁。当在它的尖头或齿中的一个击中,其振动在其基本(第一)频率,并产生可听到的声音。
音叉的第一柔性模式的特征在于尖齿的对称振动:它们同时移动朝向和远离彼此,在那里它们相交于基座平衡的力。的振动的基模不产生上附接在尖齿的交叉点处的手柄任何弯曲作用。缺乏在基部弯曲使得能够容易处理音叉而不影响它的动力学。
尖齿的横向振动使手柄在基频轴向振动。该轴向振动,可以使用通过使手柄的端部在具有较大的表面积接触,等的金属顶板以扩增可听见的声音。具有对称模式形状下一个较高的模式为约6.25倍的基频。因此,适当激发音叉趋于与对应于基频的主频率,产生一个纯可听音调振动。本实施例中通过执行模态分析和瞬态动力学模拟模拟音叉动力学的这些方面。
你可以找到的辅助功能animateSixTuningForkModes和tuningForkFFT还有几何图形文件TuningFork.stl下matlab / R20XXx / / pde的主要例子。
音叉的模态分析
找到音叉的基本模式和接下来的几个模式的固有频率和模式形状。在基频处显示出刀柄没有弯曲的效果。
首先,创建一个固体音叉模态分析的结构模型。
模型= createpde (“结构”,“模态固体”);
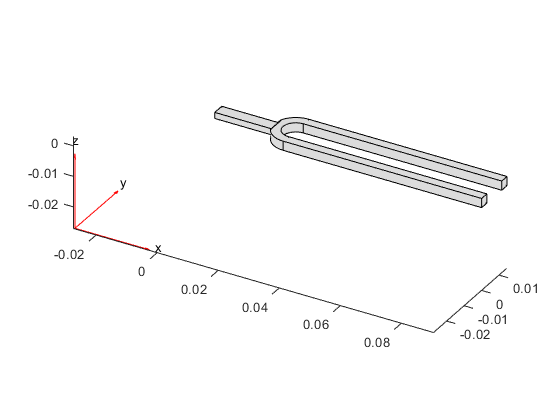
要对结构进行无约束模态分析,只需指定几何形状、网格和材料属性即可。首先,导入并绘制音叉几何图形。
importGeometry(模型,“TuningFork.stl”);图pdegplot(模型)
指定的杨氏模量,泊松比,和质量密度建模线性弹性材料行为。指定单位一致,所有物理性能。
E = 210 e9;ν= 0.3;ρ= 8000;structuralProperties(模型,'YoungsModulus',E,...'PoissonsRatio',NU,...“MassDensity”,ρ);
生成的网格。
generateMesh(模型,'HMAX',0.001);
求解所选择的频率范围中的模型。指定低于零的频率下限,使得具有接近零频率的所有模式出现在溶液中。
RF =解决(型号,'频率范围'[4000]* 2 *π);
默认情况下,求解器返回循环频率。
modeID = 1:numel(RF.NaturalFrequencies);
通过将它们除以表示以Hz为单位的频率得到的 。显示表格中的频率。
tmodalResults =表(modeID。”, RF.NaturalFrequencies / 2 / pi);tmodalResults.Properties。VariableNames = {“模式”,'频率'};disp (tmodalResults);
模式频率____ _________ 1 0.0072398 2 0.0033543 0.0025636 3 0.0039618 4 0.0053295 5 0.0094544 6 7 8 460.42 9 706.34 10 1911.5 2105.5 11 2906.5 12 3814.7
因为在这个例子中没有边界约束,模态的结果包括刚性体模式。前六个接近零的频率表示3-d固体本体的六个刚体模式。所述第一柔性模式是第七模式与周围460赫兹的频率。
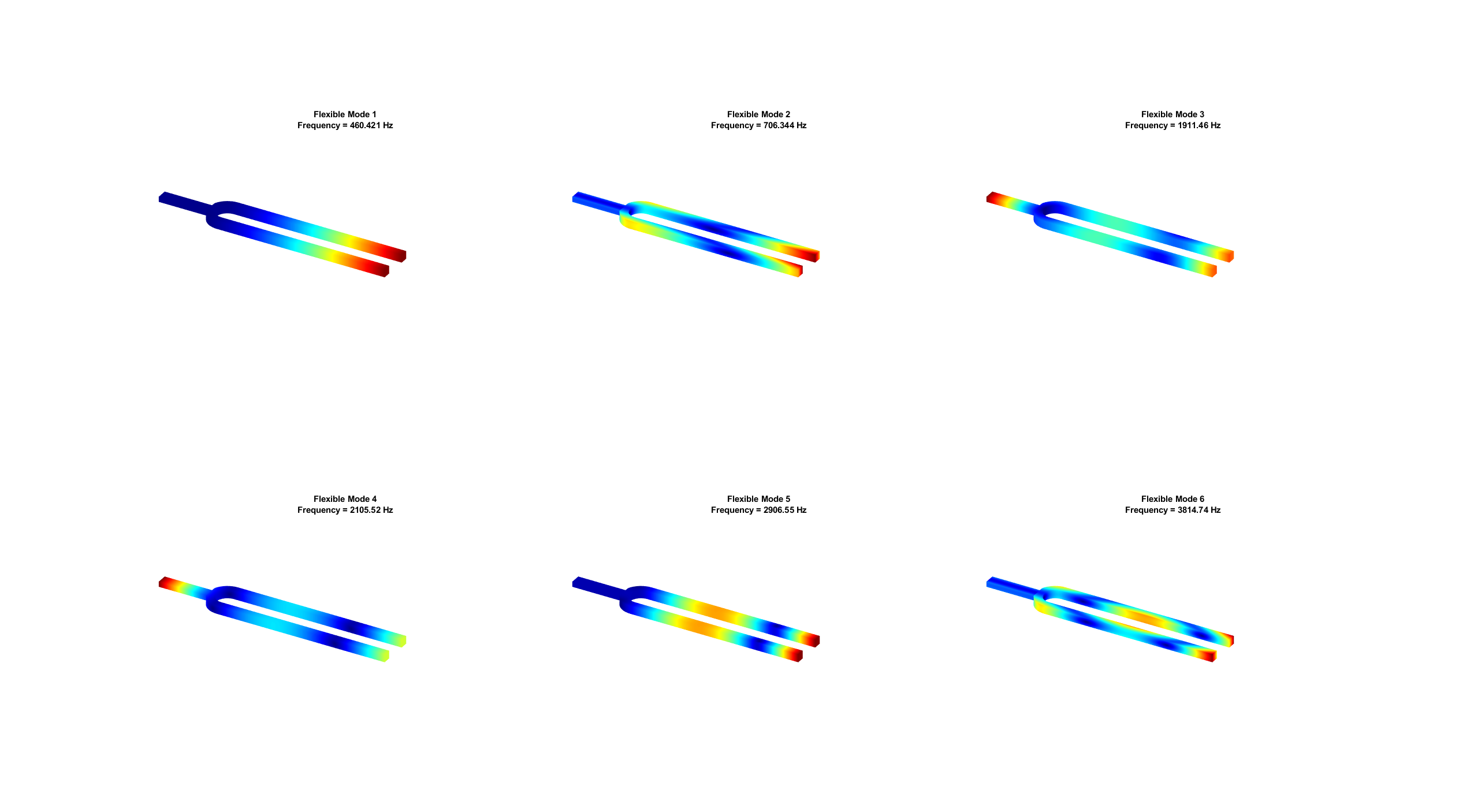
形象化模态形状的最佳方法是使谐运动在它们各自的频率上产生动画。的animateSixTuningForkModes函数动画的六个灵活的模式,这是模式7到12的模态结果射频。
帧= animateSixTuningForkModes (RF);
要播放动画,请使用以下命令:
movie(figure('units','normalize ','outerposition',[0 0 1 1]),frames,5,30)
在第一种模式中,音叉的两个摆动的尖状物平衡了手柄处的横向力。具有这种效应的下一个模态是频率为2906.5 Hz的第五个柔性模态。这个频率大约是基频460赫兹的6.25倍。
音叉的瞬态分析
模拟一个音叉被轻轻快速敲击在它的一个尖上的动态。分析了刀尖随时间的振动和刀柄的轴向振动。
首先,创建一个结构瞬态分析模型。
tmodel = createpde (“结构”,“transient-solid”);
导入时使用的模态分析相同的音叉形状。
importGeometry(tModel的,“TuningFork.stl”);
生成的网格。
目= generateMesh(tModel的,'HMAX',0.005);
指定杨氏模量、泊松比和质量密度。
structuralProperties (tmodel,'YoungsModulus',E,...'PoissonsRatio',NU,...“MassDensity”,ρ);
识别面孔通过绘制与面部标签的几何应用边界约束和载荷。
数字('单位',“归一化”,'outerposition',[0 0 1 1]) pdegplot(tmodel,“FaceLabels”,“上”)视图(-50,15)标题“带有人脸标签的几何图形”
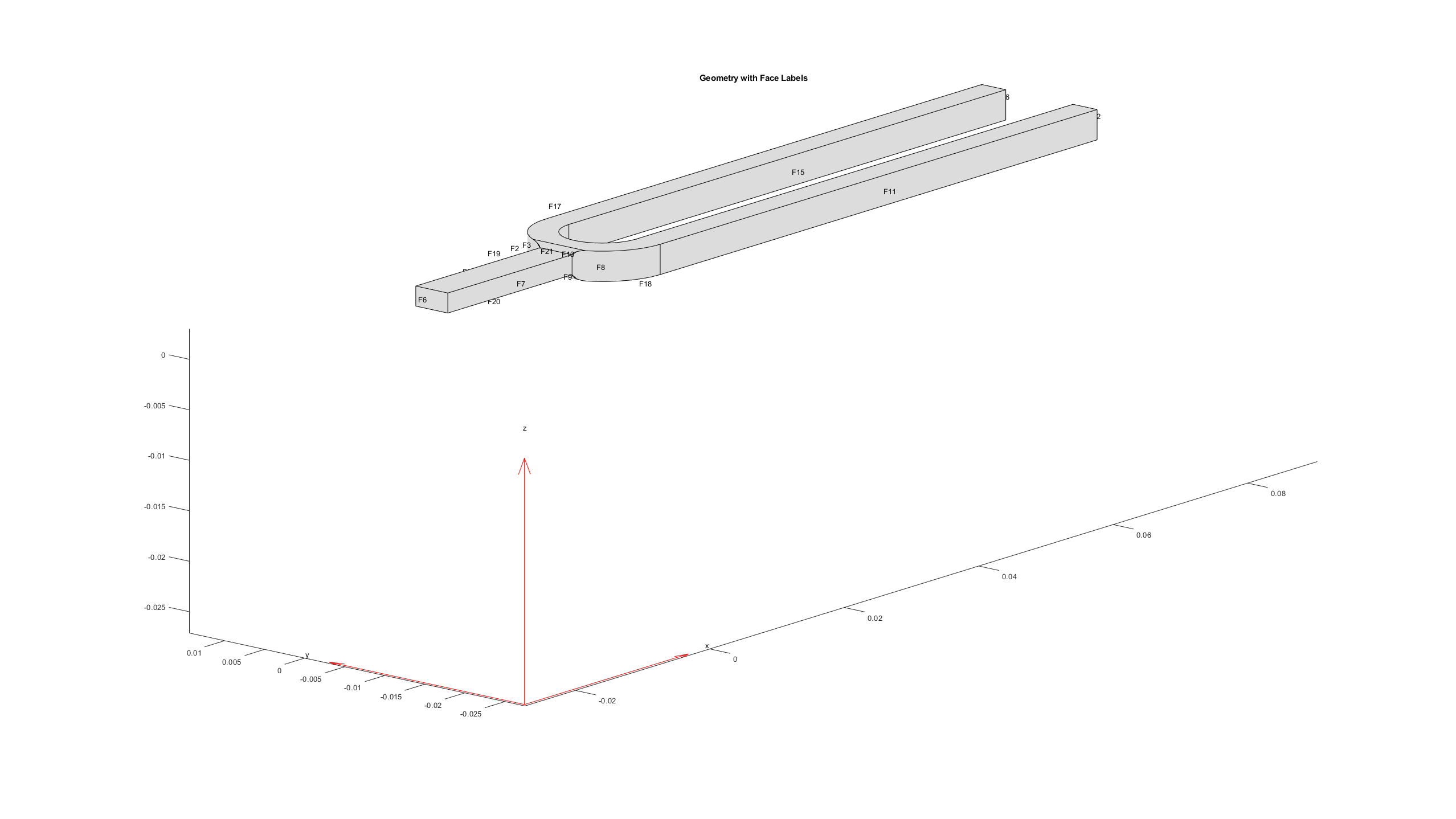
强加足够边界约束,以防止在施加载荷刚体运动。通常情况下,你持有的手音叉或者将其安装在桌子上。一个简化的近似这一边界条件尖齿的交叉点和所述手柄(面21和22)附近的固定的区域。
structuralBC (tmodel,'面对',[21,22],“约束”,'固定');
通过施加的压力负荷的基本模式的时间段的非常小的一部分近似上的表面上的齿的脉冲负载。通过使用这种很短的压力脉冲,可以确保只有一个音叉的基本模式是兴奋。为了评估的时间段T基本模式,使用模态分析的结果。
T = 2 *π/ RF.NaturalFrequencies (7);
指定上的齿作为短矩形压力脉冲的压力负荷。
structuralBoundaryLoad(tModel的,'面对'11“压力”,5E6,“EndTime”,T / 300);
将零位移和零速度作为初始条件。
structuralIC (tmodel,'移位'(0,0,0),“速度”,(0,0,0));
求解50周期基本模式下的暂态模型。对基本模式每周期采样60次。
ncycle = 50;samplingFrequency = 60 / T;tlist = linspace (0 ncycle * T ncycle * T * samplingFrequency);R =解决(tmodel tlist)
R = TransientStructuralResults具有属性:排气量:[1×1 FEStruct]速度:[1×1 FEStruct]加速:[1×1 FEStruct] SolutionTimes:[1×3000双]网眼:[1×1 FEMesh]
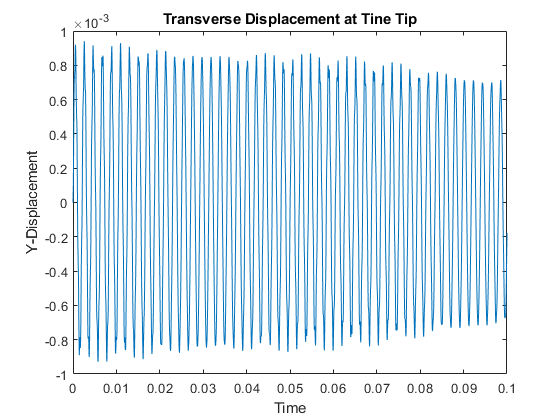
绘制时间序列的齿尖的振动,这是在尖端面面12查找节点和绘制y-位移随时间的分量,使用其中一个节点。
excitedTineTipNodes = findNodes(网、'区域','面对',12);tipDisp = R.Displacement.uy(excitedTineTipNodes(1),:);图图(R.SolutionTimes,tipDisp)称号(“齿尖横向位移”)xlim([0, 0.1])包含(“时间”)ylabel(“Y位移”)
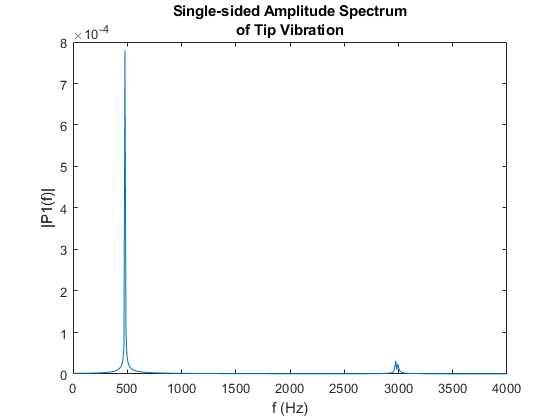
执行快速傅立叶变换的尖端位移的时间序列(FFT),以看到,音叉的振动频率接近其基频。从在无约束的模态分析中计算出的基本频率的小偏差出现因为在瞬态分析强加的约束的。
[fTip, PTip] = tuningForkFFT (tipDisp samplingFrequency);图绘制(fTip PTip)标题({“单面幅度谱”,“小费振动”})xlabel(“f (Hz)”)ylabel(“| P1 (f) |”,4000年)xlim ([0])
尖的横向振动使手柄以相同的频率轴向振动。为了观察这种振动,绘制把手端面的轴向位移时间序列。
baseNodes = tmodel.Mesh.findNodes ('区域','面对',6);baseDisp = R.Displacement.ux(baseNodes(1),:);图图(R.SolutionTimes,baseDisp)称号(“手柄端轴向位移”)xlim ([0, 0.1]) ylabel ('X-位移')xlabel(“时间”)

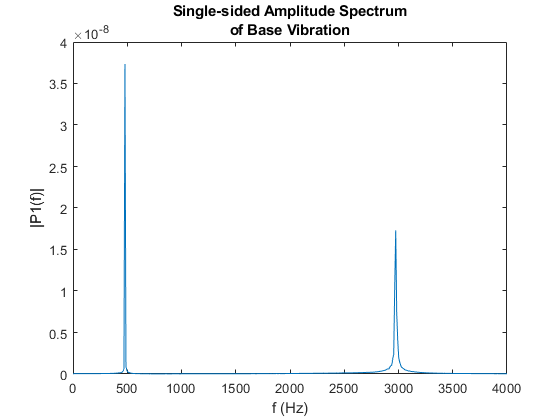
执行时间序列手柄的轴向振动的FFT。这种振动频率也接近其基本频率。
[fBase, PBase] = tuningForkFFT (baseDisp samplingFrequency);图绘制(fBase PBase)标题({“单面幅度谱”,“碱基振动”})xlabel(“f (Hz)”)ylabel(“| P1 (f) |”,4000年)xlim ([0])