常规和自适应波束转换器
本例说明了如何将数字波束形成应用于天线阵列接收的窄带信号。介绍了三种波束形成算法:相移波束形成器(phasoft)、最小方差无失真响应波束形成器(MVDR)和线性约束最小方差波束形成器(LCMV)。
模拟接收信号
首先,我们定义传入信号。信号的基带表示是一个简单的矩形脉冲,定义如下:
T = 0:0.001:0.3;%时间,采样频率为1kHzS = 0(大小(t));S = S (:);列向量中的信号S (201:205) = S (201:205) + 1;定义脉冲情节(t, s);标题(“脉搏”),包含(“时间(s)”); ylabel (“振幅(V)”);
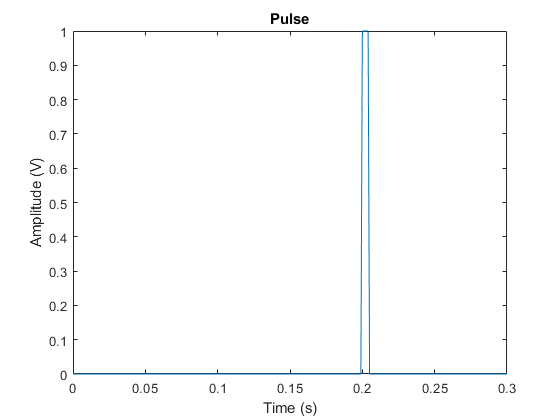
对于这个例子,我们还假设信号的载波频率是100 MHz。
carrierFreq = 100e6;波长= physconst(“光速”) / carrierFreq;
现在我们定义用于接收信号的统一线性阵列(ULA)。该阵列包含10个各向同性天线。元件间距是入射波波长的一半。
Ula =阶段性。齿龈(“NumElements”10“ElementSpacing”、波长/ 2);ula.Element.FrequencyRange = [90e5 110e6];
然后我们使用数组对象的collectPlaneWave方法来模拟数组上接收到的信号。假设信号从方位角45度,仰角0度到达阵列,接收到的信号可以建模为
inputAngle = [45;0);x = collectPlaneWave(ula,s,inputAngle,carrierFreq);
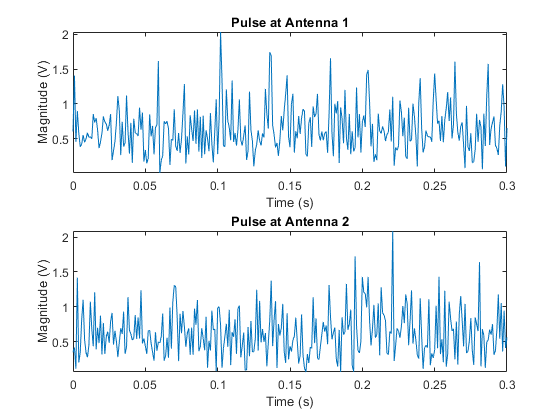
接收到的信号通常包含一些热噪声。噪声可以被建模为复杂的高斯分布随机数。在本例中,我们假设噪声功率为0.5瓦,这对应于每个天线元件的3 dB信噪比(SNR)。
创建并重置本地随机数生成器,使结果为每次都一样。rs = RandStream.create(“mt19937ar”,“种子”, 2008);noisePwr = .5;噪声功率噪声=√(noisePwr/2)*(randn(rs,size(x))+1i*randn(rs,size(x)));
总回波是接收到的信号加上热噪声。
rxSignal = x +噪声;
总的返回值有10列,其中每列对应一个天线单元。下图显示了前两个通道信号的幅度图
次要情节(211);情节(t, abs (rxSignal(: 1)));轴紧;标题(“1号天线脉冲”),包含(“时间(s)”); ylabel (“(V)级”);次要情节(212);情节(t, abs (rxSignal(:, 2)));轴紧;标题(“2号天线脉冲”),包含(“时间(s)”); ylabel (“(V)级”);
相移波束形成器
波束形成器可以被认为是一个空间滤波器,它抑制来自所有方向的信号,除了所需的方向。传统的波束形成器只是在每个天线上延迟接收到的信号,这样信号就会对齐,就好像它们同时到达所有天线一样。在窄带情况下,这相当于将每个天线接收的信号乘以一个相位因子。为了定义指向信号传入方向的相移波束形成器,我们使用
Psbeamformer =相控。PhaseShiftBeamformer (“SensorArray”、齿龈...“OperatingFrequency”carrierFreq,“方向”inputAngle,...“WeightsOutputPort”,真正的);
我们现在可以从波束形成器获得输出信号和加权系数。
[yCbf,w] = psbeamformer(rxSignal);绘制输出clf;情节(t, abs (yCbf));轴紧;标题(相移波束形成器输出);包含(“时间(s)”); ylabel (“(V)级”);
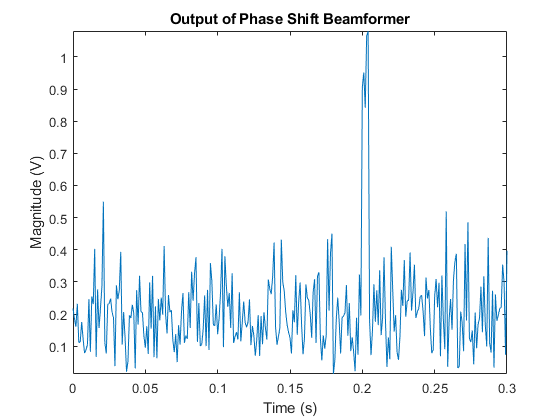
从图中,我们可以看到信号比噪声强得多。输出信噪比大约是单天线接收信号的10倍,因为10元阵列产生的阵列增益为10。
为了看到波束形成器的波束模式,我们绘制了沿0度仰角和施加权重的阵列响应。由于数组是一个具有各向同性元素的ULA,因此它在数组的前面和后面具有模糊性。因此,我们只在方位角的-90度和90度之间绘制。
绘制带有加权的数组响应模式(齿龈、carrierFreq 180:180 0“重量”w,“类型”,“powerdb”,...“PropagationSpeed”physconst (“光速”),“正常化”假的,...“CoordinateSystem”,“矩形”);轴([-90 90 -60 0]);
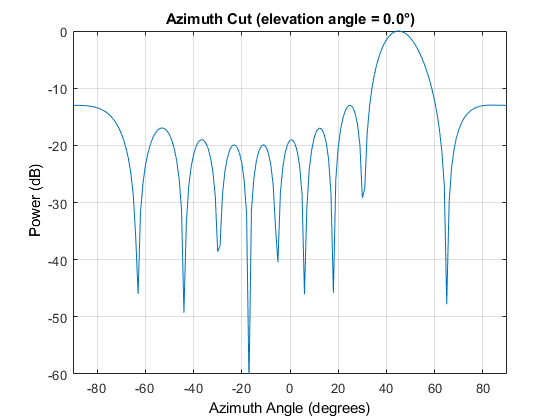
你可以看到,波束形成器的主梁指向预期的方向(45度)。
接下来,我们使用波束形成器在干扰条件下增强接收信号。在强干扰存在时,目标信号可能被干扰信号所掩盖。例如,来自附近无线电塔的干扰可以使该方向的天线阵列失明。如果无线电信号足够强,它可以在多个方向上使雷达失明,特别是当所需信号被旁瓣接收时。这种情况对于相移波束形成器来说是非常具有挑战性的,因此引入自适应波束形成器来解决这一问题。
干扰信号建模
我们模拟两个干扰信号从30度和50度的方位角到达。干扰振幅远高于前面场景中显示的期望信号。
nSamp =长度(t)s1 = 10*randn(rs,nSamp,1);s2 = 10*randn(rs,nSamp,1);%干扰在30度和50度干涉= collectPlaneWave(ula,[s1 s2],[30 50;0 0], carrierFreq);
为了说明干扰的影响,我们将把噪声水平降低到最小水平。对于示例的其余部分,让我们假设每个天线的高信噪比值为50dB。我们将看到,即使几乎没有噪声,单独的干扰也会使相移波束形成器失效。
noisePwr = 0.00001;%噪声功率,信噪比50dB噪声=√(noisePwr/2)*(randn(rs,size(x))+1i*randn(rs,size(x)));rxInt =干扰+噪声;总干扰+噪声%rxSignal = x + rxInt;总接收信号百分比
首先,我们将尝试应用相移波束形成器沿入射方向检索信号。
yCbf = psbeamformer(rxSignal);情节(t, abs (yCbf));轴紧;标题(存在干扰时相移波束形成器的输出);包含(“时间(s)”); ylabel (“(V)级”);
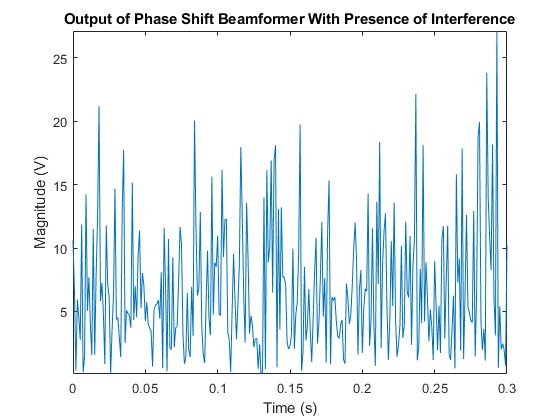
从图中可以看出,由于干扰信号比目标信号强得多,我们无法提取信号内容。
MVDR Beamformer
为了克服干扰问题,我们可以使用MVDR波束形成器,一种流行的自适应波束形成器。MVDR波束形成器保留沿所需方向到达的信号,同时试图抑制来自其他方向的信号。在这种情况下,期望的信号在方位角45度的方向上。
定义MVDR波束形成器Mvdrbeamformer =相控。MVDRBeamformer (“SensorArray”、齿龈...“方向”inputAngle,“OperatingFrequency”carrierFreq,...“WeightsOutputPort”,真正的);
当我们可以访问无目标数据时,我们可以通过将TrainingInputPort属性设置为true向MVDR波束形成器提供这样的信息。
mvdrbeamformer。培训InputPort = true;
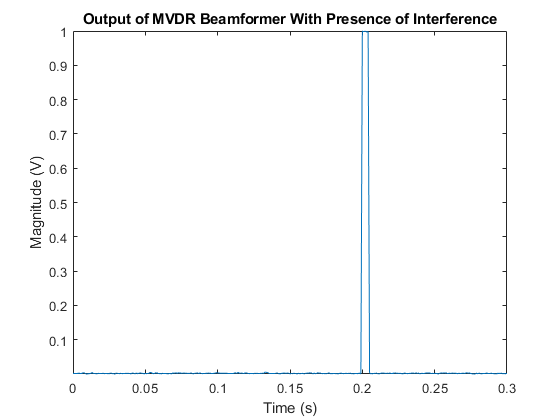
我们将MVDR波束形成器应用于接收到的信号。该图显示了MVDR波束形成器的输出信号。可以看到目标信号现在可以恢复了。
[yMVDR, wMVDR] = mvdrbeamformer(rxSignal,rxInt);情节(t, abs (yMVDR));轴紧;标题(干扰存在时MVDR波束形成器的输出);包含(“时间(s)”); ylabel (“(V)级”);
观察波束形成器的响应模式,我们看到沿干涉方向(30度和50度)有两个深空。波束形成器在45度的目标方向上也有0分贝的增益。这样,MVDR波束形成器既保留了目标信号,又抑制了干扰信号。
模式(齿龈、carrierFreq 180:180 0“重量”wMVDR,“类型”,“powerdb”,...“PropagationSpeed”physconst (“光速”),“正常化”假的,...“CoordinateSystem”,“矩形”);轴([-90 90 -80 20]);持有在;%相移相比模式(齿龈、carrierFreq 180:180 0“重量”w,...“PropagationSpeed”physconst (“光速”),“正常化”假的,...“类型”,“powerdb”,“CoordinateSystem”,“矩形”);持有从;传奇(“MVDR”,移相的)
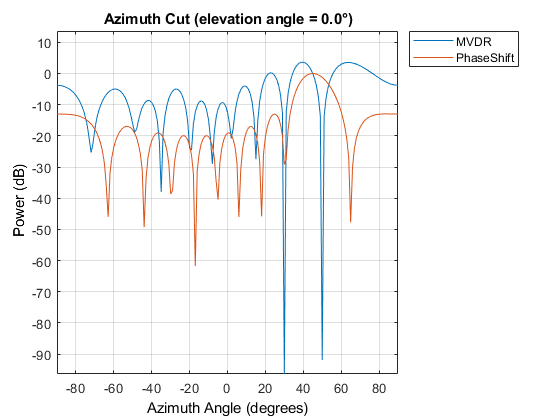
图中还显示了相移的响应模式。我们可以看到移相模式并不能完全消除干扰。
MVDR中的自空问题
在许多情况下,我们可能无法将干扰从目标信号中分离出来,因此,MVDR波束形成器必须使用包含目标信号的数据来计算权重。在这种情况下,如果目标信号沿与所期望的方向略有不同的方向接收,MVDR波束形成器将其抑制。这是因为MVDR波束形成器处理所有的信号,除了一个沿着期望的方向,作为不希望的干扰。这种效应有时被称为“信号自零”。
为了说明这种自置零效果,我们定义了一个MVDR波束形成器,并将TrainingInputPort属性设置为false。
Mvdrbeamformer_selfnull =相控。MVDRBeamformer (“SensorArray”、齿龈...“方向”inputAngle,“OperatingFrequency”carrierFreq,...“WeightsOutputPort”,真的,“TrainingInputPort”、假);
然后,我们在输入信号方向和期望方向之间创建一个方向不匹配。
回想一下,信号从45度的方位角撞击。如果有一些先验信息,我们期望信号从方位角43度到达,那么我们使用方位角43度作为MVDR波束形成器的期望方向。然而,由于真实信号到达的方位是45度,信号方向有轻微的不匹配。
expDir = [43;0);mvdrbeamformer_selfnull。方向= expDir;
当我们将MVDR波束形成器应用于接收信号时,我们看到接收机无法区分目标信号和干扰。
[ySn, wSn] = mvdrbeamformer_selfnull(rxSignal);情节(t, abs (ySn));轴紧;标题(信号方向不匹配的MVDR波束形成器输出);包含(“时间(s)”); ylabel (“(V)级”);
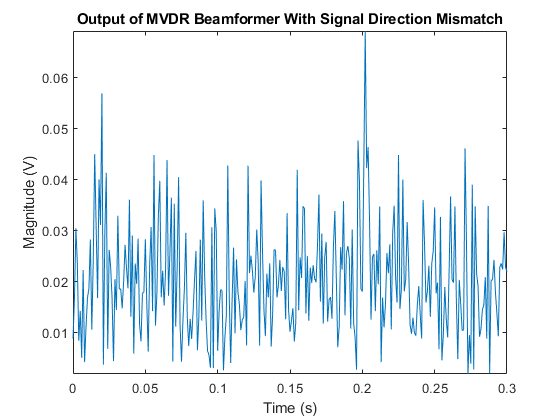
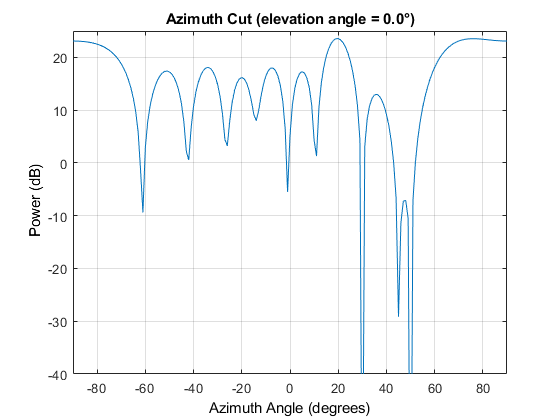
当我们观察波束器响应模式时,我们看到MVDR波束器试图抑制沿45度方向到达的信号,因为它被视为干扰信号。MVDR波束形成器对信号导向矢量失配非常敏感,特别是在无法提供干扰信息的情况下。
模式(齿龈、carrierFreq 180:180 0“重量”基础上,“类型”,“powerdb”,...“PropagationSpeed”physconst (“光速”),“正常化”假的,...“CoordinateSystem”,“矩形”);轴([-90 90 -40 25]);
淋巴细胞脉络丛脑膜炎病毒Beamformer
为了防止信号自零,我们可以使用LCMV波束形成器,它允许我们沿着目标方向(转向矢量)放置多个约束。当目标信号以与预期方向略有不同的角度到达时,它减少了目标信号被抑制的机会。首先我们创建一个LCMV波束形成器:
lcmv波束形成器=相控。LCMVBeamformer (“WeightsOutputPort”,真正的);
现在我们需要创建几个约束条件。为了指定一个约束,我们在约束矩阵constraint和期望的响应向量DesiredResponse中放入相应的条目。Constraint中的每一列都是我们可以应用到数组的一组权重,而DesiredResponse中的相应条目是我们在应用权重时想要达到的期望响应。例如,为了避免本例中的自置空,我们可能想在波束形成器中添加以下约束:
保留来自预期方向(方位角43度)的传入信号。
为了避免自置零,确保波束形成器的响应不会在预期方向的+/- 2度处下降。
对于所有的约束,权重由引导数组向这些方向移动的转向向量给出:
Steeringvec =相控。SteeringVector (“SensorArray”、齿龈);stv = steeringvec(carrierFreq,[43 41 45]);
三个方向的期望响应都应为1。约束矩阵和期望响应由:
lcmvbeamformer。约束= stv;lcmvbeamformer。DesiredResponse = [1;1;1);
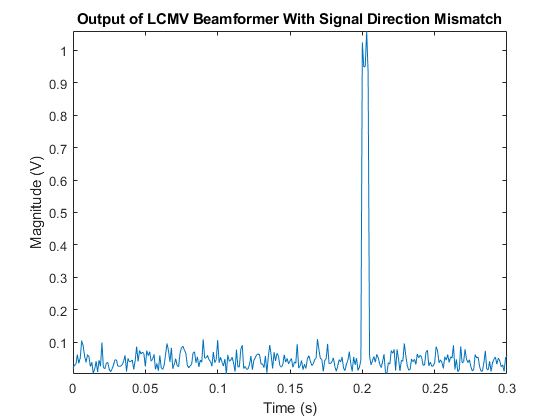
然后我们将波束形成器应用于接收到的信号。下图显示,即使期望信号和真实信号到达方向之间存在不匹配,目标信号也可以再次被检测到。
[yLCMV,wLCMV] = lcmvbeamformer(rxSignal);情节(t, abs (yLCMV));轴紧;标题(信号方向不匹配的LCMV波束形成器输出);包含(“时间(s)”); ylabel (“(V)级”);
LCMV响应模式表明,波束形成器沿指定方向施加约束,同时沿30度和50度消零干扰信号。这里我们只显示0到90度方位角之间的模式,以便我们可以更好地看到信号和干扰方向上响应模式的行为。
模式(齿龈、carrierFreq 180:180 0“重量”wLCMV,“类型”,“powerdb”,...“PropagationSpeed”physconst (“光速”),“正常化”假的,...“CoordinateSystem”,“矩形”);轴([0 90 -40 35]);持有在;%与MVDR相比模式(齿龈、carrierFreq 180:180 0“重量”基础上,...“PropagationSpeed”physconst (“光速”),“正常化”假的,...“类型”,“powerdb”,“CoordinateSystem”,“矩形”);持有从;传奇(淋巴细胞脉络丛脑膜炎病毒的,“MVDR”);
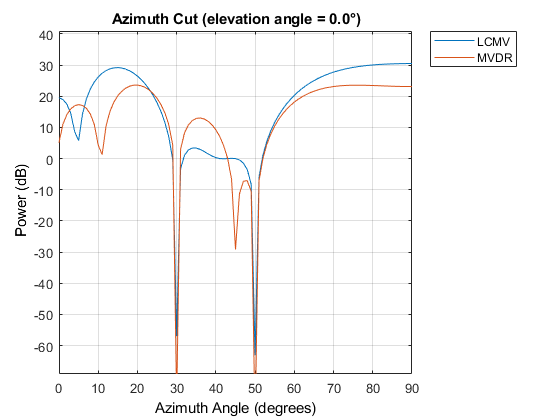
将LCMV波束器的响应模式与MVDR波束器的响应模式进行比较,可以更好地看出约束的影响。注意LCMV波束形成器是如何在方位角45度附近保持一个平坦的响应区域的,而MVDR波束形成器创建一个null。
二维阵列波束形成
在本节中,我们将说明使用均匀矩形阵列(URA)的波束形成器。波束形成器可以应用于市区重建局,也可以应用于ULA。在这个例子中,我们只说明了市建局的MVDR波束器。其他算法的使用也类似。
首先,我们定义一个市建局。URA由10行5列各向同性天线单元组成。行与列之间的间距分别为0.4和0.5波长。
colSp = 0.5*波长;rowSp = 0.4*波长;Ura =阶段性。(精“大小”10 [5],“ElementSpacing”, (rowSp colSp]);ura.Element.FrequencyRange = [90e5 110e6];
考虑与前几节中使用的相同的源信号。源信号从方位角45度,仰角0度到达市建局。接收到的信号,包括阵列上的噪声,可以被建模为
x = collectPlaneWave(ura,s,inputAngle,carrierFreq);噪音=√noisePwr / 2) * (randn (rs、尺寸(x)) + 1我* randn (rs,大小(x)));
与ULA只能在方位角方向上区分角度不同,URA还可以在仰角方向上区分角度。因此,我们指定两个干扰信号分别沿[30;10]和[50;-5]度方向到达。
s1 = 10*randn(rs,nSamp,1);s2 = 10*randn(rs,nSamp,1);%干涉在[30;10] and at [50;5]干涉= collectPlaneWave(ura,[s1 s2],[30 50;10 5], carrierFreq);rxInt =干扰+噪声;总干扰+噪声%rxSignal = x + rxInt;总接收信号百分比
我们现在创建一个指向目标信号方向的MVDR波束形成器。
Mvdrbeamformer =相控。MVDRBeamformer (“SensorArray”ura所言,...“方向”inputAngle,“OperatingFrequency”carrierFreq,...“TrainingInputPort”,真的,“WeightsOutputPort”,真正的);
最后,我们将MVDR波束形成器应用于接收信号并绘制其输出。
[yURA呢,w] = mvdrbeamformer (rxSignal rxInt);情节(t, abs (yURA呢));轴紧;标题(“市建局MVDR波束器输出”);包含(“时间(s)”); ylabel (“(V)级”);
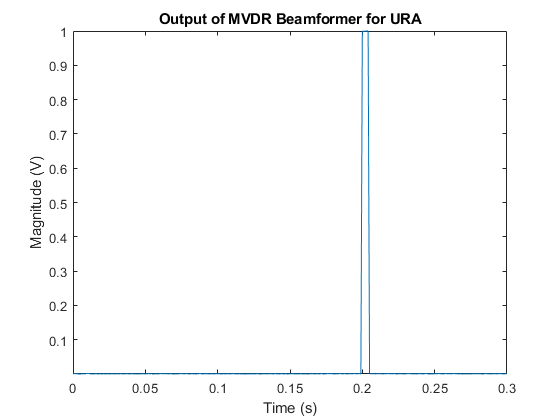
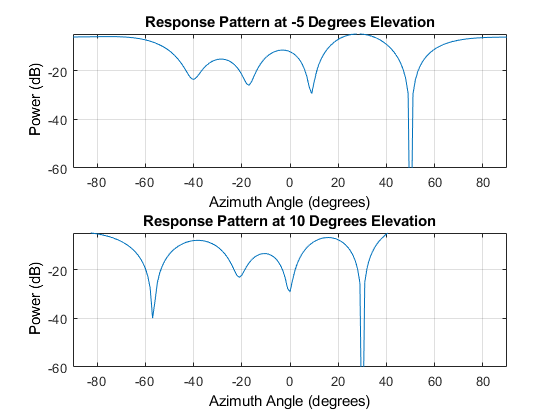
为了清楚地看到波束器沿干扰方向放置空值,我们将分别沿仰角-5度和10度绘制阵列的波束器响应模式。由图可知,波束形成器沿[30 10]和[50 -5]方向抑制干扰信号。
次要情节(2,1,1);模式(ura所言,carrierFreq 180:180 5,“重量”w,“类型”,“powerdb”,...“PropagationSpeed”physconst (“光速”),“正常化”假的,...“CoordinateSystem”,“矩形”);标题(“海拔-5度时的响应模式”);轴([-90 90 -60 -5]);次要情节(2,1,2);模式(ura所言,carrierFreq 180:180 10,“重量”w,“类型”,“powerdb”,...“PropagationSpeed”physconst (“光速”),“正常化”假的,...“CoordinateSystem”,“矩形”);标题(“海拔10度的响应模式”);轴([-90 90 -60 -5]);
总结
在本例中,我们演示了如何使用波束形成器通过ULA或URA从特定方向检索信号。波束形成器的选择取决于操作环境。自适应波束形成器与传统波束形成器相比,具有更好的抗干扰能力。当目标方向知识不准确时,LCMV波束形成器可以防止信号自零。
您也可以从以下列表中选择一个网站: