简介微多普勒效应
这个例子介绍了微多普勒效应的基本概念,在雷达回波的目标由于旋转的目标。你可以使用微多普勒信号来帮助识别目标。
介绍
移动目标引入了雷达回波的频移是由于多普勒效应。然而,因为大多数的目标不是刚性的机构,往往还有其他的振动,并在除了平台的移动目标的不同部分旋转。例如,当一个直升机飞行,它的叶片旋转,或者当一个人走,他们的两臂自然摆动。这些微观尺度运动产生额外的多普勒频移中,被称为微多普勒效应,这在识别目标的特征是有用的。这个例子显示了两个应用程序,其中微多普勒效应可以是有益的。在第一种应用中,微多普勒签名被用于确定直升机的叶片速度。在第二应用中,微多普勒签名用于在汽车雷达回波以确定的行人。
直升机的估算叶片速度
考虑一架有四个旋翼叶片的直升机。假设雷达位于原点。指定直升飞机的位置为(500,0,500),这设置它到雷达的距离(米)和速度(60,0,0)米/秒。
radarpos = [0; 0; 0];radarvel = [0; 0; 0];tgtinitpos = [500; 0; 500];tgtvel = [60; 0; 0];tgtmotion = phased.Platform(“InitialPosition”tgtinitpos,'速度',tgtvel);
旋转中心和四个叶片的技巧:在这个模拟中,直升机是由五个散射建模。旋转中心与直升机机身移动。每个叶片尖端间隔90度的其相邻的叶片的尖端。叶片以每秒4转的恒定速度旋转。每个叶片的臂的长度为6.5米。
Nblades = 4;bladeang =(0:Nblades-1)* 2 * PI / Nblades;bladelen = 6.5;bladerate = deg2rad(4 * 360);%RPS - >弧度/秒
假设四个叶尖的反射率相同,而旋转中心的反射率较强。
C = 3E8;FC = 5E9;helicop = phased.RadarTarget('MeanRCS'[10 0.1 0.1 0.1 0.1],“PropagationSpeed”c...“OperatingFrequency”、fc);
直升机回波模拟
假设雷达在5GHz用一个简单的脉冲操作。脉冲重复频率为20kHz。为简单起见,假定在自由空间中的信号传播。
FS = 1E6;PRF = 2E4;拉姆达= C / FC;WAV = phased.RectangularWaveform('采样率'fs,“脉冲宽度”2 e-6'PRF'脉冲重复频率);ura所言= phased.URA ('尺寸'4“ElementSpacing”λ/ 2);tx = phased.Transmitter;rx = phased.ReceiverPreamp;env = phased.FreeSpace (“PropagationSpeed”c“OperatingFrequency”足球俱乐部,...“TwoWayPropagation”,真正,'采样率'fs);txant = phased.Radiator ('传感器'ura所言,“PropagationSpeed”c“OperatingFrequency”、fc);rxant = phased.Collector ('传感器'ura所言,“PropagationSpeed”c“OperatingFrequency”、fc);
在每一个脉冲,直升机沿着它的轨迹移动。同时,刀片保持旋转,而叶片的尖端引入额外的位移和角速度。
NSampPerPulse =圆(fs /脉冲重复频率);硝石= 1 e4;复杂(y = 0 (NSampPerPulse硝石));rng (2018);对于m = 1:硝石%更新直升机运动T =(M-1)/ PRF;[scatterpos,scattervel,scatterang] = helicopmotion(T,tgtmotion,bladeang,bladelen,bladerate);%模拟回波X = TXANT(TX(WAV()),scatterang);%传输xt = env (x, radarpos scatterpos、radarvel scattervel);%传播到从散射体/XT = helicop(XT);%反映XR = RX(RXANT(XT,scatterang));%接收Y(:,M)=总和(XR,2);% beamform结束
此图显示了使用接收到的信号的第一128个脉冲的范围内多普勒响应。您可以在约700米,目标在区间的看到三个返回的显示。
rdresp = phased.RangeDopplerResponse(“PropagationSpeed”c'采样率'fs,...“DopplerFFTLengthSource”,'属性',“DopplerFFTLength”,128,“DopplerOutput”,'速度',...“OperatingFrequency”、fc);mfcoeff = getMatchedFilter(WAV);plotResponse(rdresp,Y(:,1:128),mfcoeff);ylim([0 3000])
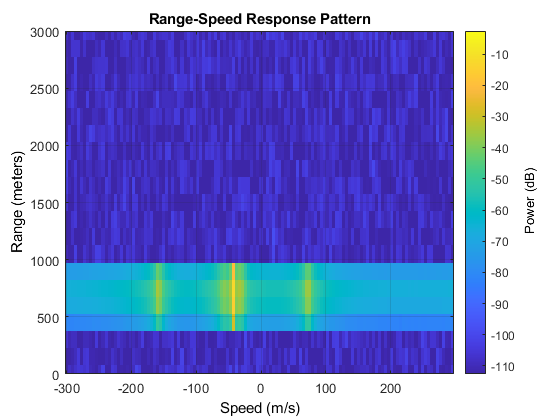
虽然回报看起来像是来自不同的目标,但实际上它们都来自同一个目标。中心返回来自旋转中心,并且比其他两个返回强得多。这种强度是由于反射从直升机的身体是更强的相比之下,叶片的尖端。图中旋转中心的速度为- 40m /s。该值与目标径向速度的真实值相匹配。
tgtpos = scatterpos (: 1);tgtvel = scattervel (: 1);tgtvel_truth = radialspeed (tgtpos tgtvel、radarpos radarvel)
tgtvel_truth = -43.6435
另外两个收益从叶片的尖端,当他们接近或离开的目标以最大的速度。从图中,对应于这两种方法和离开检测的速度是大约75米/ s和-160米/秒,。
maxbladetipvel = [bladelen * bladerate; 0; 0];VTP = radialspeed(tgtpos,-maxbladetipvel + tgtvel,radarpos,radarvel)VTN = radialspeed(tgtpos,maxbladetipvel + tgtvel,radarpos,radarvel)
vtp = 75.1853 vtn = -162.4723
您可以将所有的三个探测关联,以通过进一步的处理相同的目标,但该主题不在本例中的范围。
叶片回微多普勒分析
微多普勒效应的时频表示可以揭示更多的信息。此代码构造中检测到的目标范围段的时间 - 频率表示。
mf = phased.MatchedFilter (“系数”,mfcoeff);YMF = MF(y)基[〜,ridx] = MAX(总和(ABS(YMF),2));通过峰发现沿范围%的检测pspectrum (ymf (ridx:),脉冲重复频率,“频谱”)
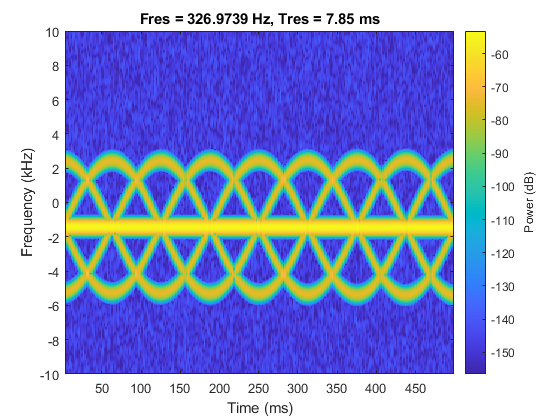
该图显示了微多普勒调制引起的绕恒定的多普勒频移叶片尖端。图像表明,每个叶片尖端引入了正弦曲线状的多普勒调制。如在下面的图中所指出的,正弦曲线的每个周期内,有出现在相等的距离三个额外的正弦曲线。此外观表明直升机配备有四个等距间隔开的叶片。
汉诺= helperAnnotateMicroDopplerSpectrogram(GCF);
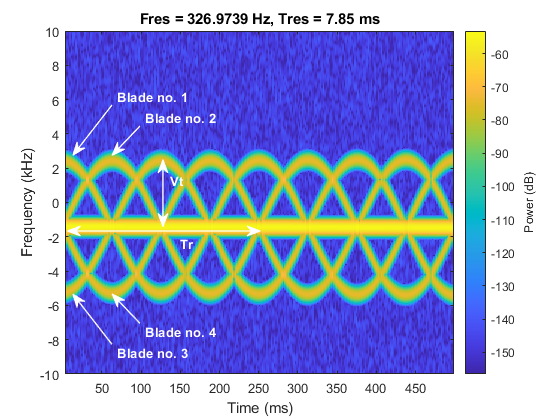
除了叶片的数量,图像还示出了每个正弦曲线,TR,的周期为约250毫秒。此值意味着刀片返回后250毫秒原来的位置。在这种情况下,直升机的角速度为约每秒4转,其相匹配的模拟参数。
TP = 250E-3;bladerate_est = 1 / TP
bladerate_est = 4
该图像还示出了尖端速度VT,其可从最大多普勒导出。最大多普勒是大约4kHz远离多普勒引入通过本体运动的恒定。计算所检测到的最大末端速度。
Vt_detect = dop2speed(4E3,C / FC)/ 2
Vt_detect = 120
这个值是沿径向的最大叶尖速度。为了获得正确的最大叶尖速度,必须考虑相对方向。由于叶片是在一个圆内旋转,所以检测不受方位角的影响。修正最大叶尖速度结果的仰角。
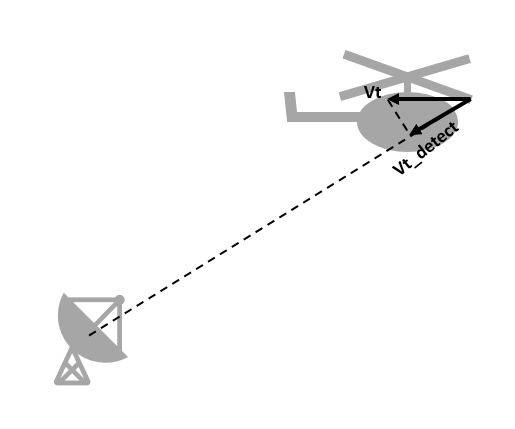
DOA = phased.MUSICEstimator2D('SensorArray'ura所言,“OperatingFrequency”足球俱乐部,...“PropagationSpeed”c“DOAOutputPort”,真正,'ElevationScanAngles',-90:90);[〜,ang_est] = DOA(XR);Vt_est = Vt_detect / COSD(ang_est(2))
Vt_est = 164.0793
根据修正后的最大叶尖速度和叶片旋转速度,计算出叶片长度。
bladelen_est = Vt_est /(bladerate_est * 2 * PI)
bladelen_est = 6.5285
结果与仿真参数6.5米相吻合。诸如桨叶数量、桨叶长度和桨叶转速等信息可以帮助识别直升机的模型。
汽车雷达中的行人识别
考虑到一个自我的轿车,其FMCW机动车雷达系统,其带宽为250 MHz和24 GHz的运行。
bw = 250 e6;fs = bw;fc = 24 e9;tm = 1 e-6;wav = phased.FMCWWaveform ('采样率'fs,“SweepTime”tm,...'SweepBandwidth',BW);
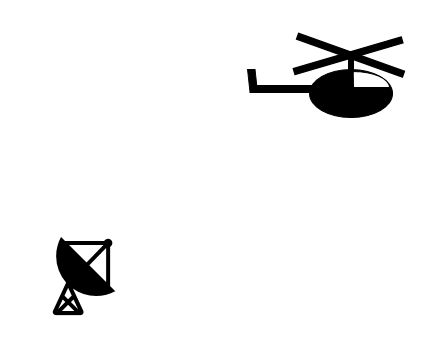
自我车在道路上行驶。一路上,有停在街边一辆车和一个人是走出后面的车。场景是如下图所示

在此基础上建立,如果自我汽车不能识别行人的存在,可能会发生事故。
egocar_pos = [0; 0; 0];egocar_vel = [30 *3600分之1600; 0; 0];egocar = phased.Platform(“InitialPosition”,egocar_pos,'速度',egocar_vel,...'OrientationAxesOutputPort',真正的);parkedcar_pos = (39; 4 0);parkedcar_vel = (0, 0, 0);parkedcar = phased.Platform (“InitialPosition”,parkedcar_pos,'速度'parkedcar_vel,...'OrientationAxesOutputPort',真正的);parkedcar_tgt = phased.RadarTarget(“PropagationSpeed”c“OperatingFrequency”足球俱乐部,'MeanRCS'10);ped_pos = (40; 3; 0);ped_vel = (0, 1, 0);ped_heading = 90;ped_height = 1.8;ped = phased.BackscatterPedestrian (“InitialPosition”,ped_pos,'InitialHeading'ped_heading,...“PropagationSpeed”c“OperatingFrequency”足球俱乐部,“高度”,1.6,'WalkingSpeed'1);chan_ped = phased.FreeSpace (“PropagationSpeed”c“OperatingFrequency”足球俱乐部,...“TwoWayPropagation”,真正,'采样率'fs);chan_pcar = phased.FreeSpace (“PropagationSpeed”c“OperatingFrequency”足球俱乐部,...“TwoWayPropagation”,真正,'采样率'fs);TX = phased.Transmitter(“PeakPower”,1'获得',25);RX = phased.ReceiverPreamp('获得'25,“噪声系数”10);
行人微萃取
下图显示了由ego car的雷达随时间生成的距离-多普勒地图。在距离-多普勒图中,由于停放的车辆是比行人更强的目标,行人很容易被停放的车辆所跟踪。因此,地图总是显示单个目标。
这意味着在这种情况下,传统的加工不能满足我们的需求。
在时频域微多普勒效应可以是一个很好的候选人,以确定是否有嵌入到雷达信号的行人签名。作为一个例子,下面的部分模拟2.5秒的雷达回波。
TSAMP = 0.001;npulse = 2500;XR =络合物(零(圆(FS * TM),npulse));xr_ped =络合物(零(圆(FS * TM),npulse));对于m = 1时:npulse [pos_ego,vel_ego,ax_ego] = egocar(TSAMP);[pos_pcar,vel_pcar,ax_pcar] = parkedcar(TSAMP);[pos_ped,vel_ped,ax_ped] =举动(PED,TSAMP,ped_heading);[〜,angrt_ped] = rangeangle(pos_ego,pos_ped,ax_ped);[〜,angrt_pcar] = rangeangle(pos_ego,pos_pcar,ax_pcar);X = TX(WAV());xt_ped = chan_ped(repmat(X,1,尺寸(pos_ped,2)),pos_ego,pos_ped,vel_ego,vel_ped);xt_pcar = chan_pcar(X,pos_ego,pos_pcar,vel_ego,vel_pcar);xt_ped =反映(PED,xt_ped,angrt_ped);xt_pcar = parkedcar_tgt(xt_pcar); xr_ped(:,m) = rx(xt_ped); xr(:,m) = rx(xt_ped+xt_pcar);结束xd_ped =连词(dechirp (xr_ped x));xd =连词(dechirp (xr, x));
在模拟信号中,xd_ped只包含行人返回的whileXD包含从行人和停放的汽车返回。如果我们仅使用行人的返回来生成光谱图,我们将得到如下图所示的图。
clf;光谱图(总和(xd_ped),皇帝(128年,10),120256年,1 / Tsamp,“中心”的,“桠溪”);这一=得到(gca,'CLIM');集(GCA,'CLIM',CLIM(2)+ [ - 50 0])

请注意,胳膊和腿摆动在沿途的时频域产生许多抛物线。因此,这样的特征可以被用于确定在场景中是否存在的行人。
然而,当我们直接从总回报产生的频谱,我们得到如下图。
谱图(总和(XD),凯瑟(128,10),120,256,1 / TSAMP,“中心”的,“桠溪”);这一=得到(gca,'CLIM');集(GCA,'CLIM',CLIM(2)+ [ - 50 0])

我们观察到的是,停放的汽车的回报继续称霸的回报,甚至在时频域。因此,时间频率响应仅示出了多普勒相对于所述停放的汽车。多普勒频率的下降是由于自我车越来越接近停放的汽车和相对速度朝着0下降。
要查看是否有隐藏在背后的强势回归回报,我们可以使用奇异值分解。下图显示的解线性调频脉冲的奇异值的分布。
[UXD,SXD,VxD的] = SVD(XD);CLF情节(10 *日志10(DIAG(SXD)));xlabel('秩');ylabel(的奇异值);持有在;情节(56 [56],[10]-40,“r——”);情节(100 [100],[10]-40,“r——”);情节(110 [110],[10]-40,“r——”);文本(25,-10,'一个');文本(75、-10、'B');文本(105,-10,'C');文本(175、-10、'd');
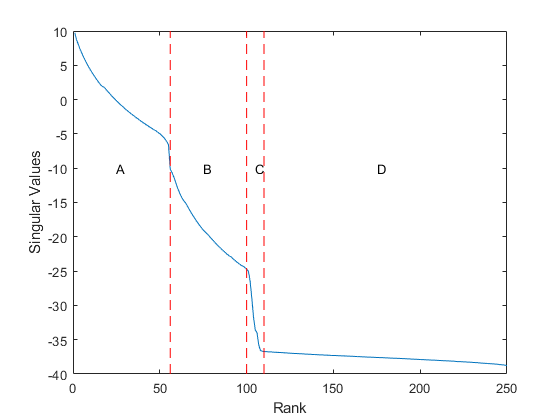
从曲线上可以清楚地看出,大约有四个区域。区域A代表了对信号最重要的贡献,那就是停放的汽车。区域D代表噪声。因此,区域B和C是由于停车返回和行人返回的混合。因为从行人返回比从停着的车返回要弱得多。在B区,它仍然可以被从停着的车返回的残留物所掩盖。因此,我们选取C区域重建信号,然后再次绘制时频响应。
RK = 100:110;XDR = UXD(:,RK)* SXD(RK,:)*的VxD';CLF谱图(总和(XDR),凯瑟(128,10),120,256,1 / TSAMP,“中心”的,“桠溪”);这一=得到(gca,'CLIM');集(GCA,'CLIM',CLIM(2)+ [ - 50 0])

随着从车返回成功过滤,从行人出现微多普勒签名。因此,我们可以得出结论,有行人在现场,并采取相应的行动,以避免发生意外。
总结
这个例子介绍了微多普勒效应的基本概念,并展示了它对目标回波的影响。文中还介绍了如何从接收到的I/Q信号中提取微多普勒信号,然后从微多普勒信息中提取相关的目标参数。
参考文献
[1]陈,V. C.,微多普勒效应的雷达,艺达大厦,2011
陈文政,李凤凤,s.s。,“微多普勒效应在雷达中的应用:现象、模型与仿真研究”,IEEE航空航天和电子系统汇刊,第42卷,第1期,2006年1月
效用函数
函数helicopmotion模拟直升机的多个散射体的运动。
函数[scatterpos, scattervel scatterang] = helicopmotion (...吨,tgtmotion,BladeAng,ArmLength,BladeRate)PRF = 2E4;radarpos = [0; 0; 0];Nblades =尺寸(BladeAng,2);[tgtpos,tgtvel] = tgtmotion(1 / PRF);RotAng = BladeRate * T;scatterpos = [0 ArmLength * COS(+ RotAng BladeAng); 0 ArmLength * SIN(+ RotAng BladeAng);零(1,Nblades + 1)] + tgtpos;scattervel = [0 -BladeRate * ArmLength * SIN(+ RotAng BladeAng);...0 BladeRate * ArmLength * cos (RotAng + BladeAng); 0 (1, Nblades + 1)] + tgtvel;[~,scatterang] = rangeangle (scatterpos radarpos);结束
你也可以从以下列表中选择一个网站: