时空自适应处理导论
本例简要介绍了空时自适应处理(STAP)技术,并说明了如何使用相控阵系统工具箱™ 将STAP算法应用于接收到的脉冲。STAP是机载雷达系统中用来抑制杂波和干扰的技术。
介绍
在地面移动目标指示(GMTI)系统,机载雷达收集从地面上的运动目标的返回的回波。然而,所接收的信号不仅包含来自目标的反射回波,而且从被照射地面的回报率。从地面返回的是一般被称为杂波.
杂波回报来自于所有由雷达波束照射的区域,所以它占所有范围段皆通。总的杂波往往比返回的回声信号,认为这对目标探测的巨大挑战强得多。杂波滤波,因此,是一种GMTI系统的关键部分。
在传统的MTI系统中,杂波滤波常常利用地面不动这一事实。因此,杂波占据了多普勒频谱中的零多普勒空间。这一原理导致了许多基于多普勒的杂波滤波技术,如脉冲消除器。有兴趣的读者可以参考利用移动目标指示(MTI)雷达降低地面杂波有关脉冲消除器的详细示例。当雷达平台本身也在移动时,如在飞机上,从地面返回的多普勒分量不再为零。此外,杂波回波的多普勒分量与角度有关。在这种情况下,杂波返回可能有能量通过多普勒频谱。因此,杂波不能只根据多普勒频率进行滤波。
干扰是接收信号中经常出现的另一种重要干扰源。最简单的干扰形式是弹幕干扰机,它是指向雷达接收机的强连续白噪声,使接收机无法轻易地检测到目标返回。干扰机通常位于特定的位置,因此干扰信号与特定的方向相关联。然而,由于干扰机的白噪声特性,接收到的干扰信号占据了整个多普勒频带。
STAP技术在这两个角度和多普勒域(因此,名称为“空间时自适应处理”),以抑制杂波和干扰返回过滤信号。在下面的章节中,我们从目标,杂波和干扰模拟回报,说明STAP技术如何过滤从接收信号的干扰。
系统设置
我们首先定义一个雷达系统,从建在示例中,系统启动设计一种基本的单稳态脉冲雷达.
负载基本静态雷达采样数据.mat;%负载单稳态脉冲雷达
天线定义
假设天线单元在前半球具有各向同性响应,在后半球均为零。工作频率范围设置为8 - 12ghz,以匹配系统的10ghz工作频率。
天线= phased.IsotropicAntennaElement...(“FrequencyRange”(8 e9 12 e9),'背贴',真正);%困惑各向同性
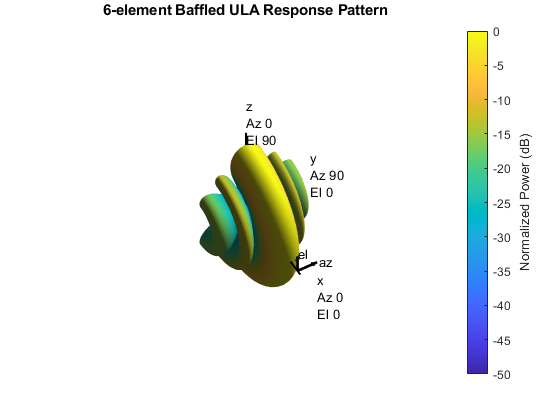
使用自定义元素模式定义6个元素的ULA。元件间距假定为波形波长的一半。
fc = radiator.OperatingFrequency;c = radiator.PropagationSpeed;λ= c / fc;齿龈= phased.ULA (“元素”、天线、“NumElements”,6,...'ElementSpacing'λ/ 2);模式(fc,齿龈“PropagationSpeed”,c,“类型”,'电源数据库')标题(“6元件挡板式ULA响应模式”)视图(60,50)
雷达的设置
接下来,将天线阵列安装到散热器/收集器上。然后,定义雷达运动。雷达系统安装在离地面1000米的飞机上。该飞机沿ULA的阵列轴飞行,其速度使其在一个脉冲间隔内移动阵列的半个单元间隔。(下面的DPCA技术部分提供了这种设置的说明。)
散热器。传感器=齿龈;收集器。传感器=齿龈;sensormotion = phased.Platform ('初始位置',(0;0;1000));arrayAxis = [0;1;0);脉冲重复频率= waveform.PRF;vr = ula.ElementSpacing *脉冲重复频率;%英寸[米/秒]sensormotion。速度= vr / 2 * arrayAxis;
目标
接下来,定义与1平方米在地面上移动的雷达横截面的nonfluctuating目标。
目标= phased.RadarTarget ('模型',“Nonfluctuating”,'平均',1...'工作频率'、fc);tgtmotion = phased.Platform ('初始位置',1000;1000;0),...“速度”[30;30;0]);
干扰器
目标返回所需信号;然而,接收信号中也存在多个干扰。本节重点介绍干扰机。定义一个有效辐射功率为100瓦的简单阻塞干扰机。
扰乱= phased.BarrageJammer('企业资源规划',100);Fs=波形采样;rngbin=c/2*(0:1/Fs:1/prf-1/Fs)。';jammer.SamplesPerFrame=numel(rngbin);jammermotion=相位。平台('初始位置',1000;1732;1000));
杂波
在这个例子中,我们使用伽马值为-15db的恒定伽马模型来模拟杂波。文献表明,这种伽玛值可以用来模拟森林覆盖的地形。对于每个距离,杂波返回可以看作是该距离环上许多小杂波块返回的组合。由于天线是后挡板,杂波的贡献只是从前面。若要简化计算,请为每个面片使用10度的方位角宽度。
混乱= phased.ConstantGammaClutter ('传感器'、齿龈“SampleRate”,飞秒,...'伽马',-15,'PlatformHeight',1000,...'工作频率'足球俱乐部,...“PropagationSpeed”,c,...脉冲重复频率的脉冲重复频率,...'TransmitERP',发射机。峰值功率*db2pow(发射机。增益),...'平台速度'、规范(sensormotion.Velocity),...“PlatformDirection”(90,0),...“BroadsideDepressionAngle”0,...“MaximumRange”,5000,...'AzimuthCoverage',180,...'PatchAzimuthWidth'10,...“OutputFormat”,“脉冲”);
传播路径
最后,创建一个自由空间环境来表示目标和干扰器路径。由于我们使用的是单基地雷达系统,目标信道被设置为模拟双向传播延迟。干扰器路径只计算单向传播延迟。
tgtchannel=phased.FreeSpace('TwoWayPropagation',真正,“SampleRate”,飞秒,...'工作频率'、fc);jammerchannel = phased.FreeSpace ('TwoWayPropagation',假,...“SampleRate”,飞秒,'工作频率'、fc);
模拟回路
我们现在准备模拟的回报。收集处理前10个脉冲。从干扰模型中的随机数发生器的种子被设定为一个常数来获得可重复的结果。
干扰机。SeedSource =“属性”;干扰机。种子= 5;杂乱。SeedSource =“属性”;clutter.Seed = 5;numpulse = 10;脉冲数tsig=0(大小(rngbin,1),ula.NumElements,numpulse);jsig=tsig;tjcsig=tsig;tcsig=tsig;csig=tsig;为m = 1时:numpulse%更新传感器、目标和干扰机位置[sensorpos,sensorvel] = sensormotion(1 / PRF);[tgtpos,tgtvel] = tgtmotion(1 / PRF);[jampos,jamvel] = jammermotion(1 / PRF);%计算目标和干扰的角度由传感器所看到[〜,tgtang] = rangeangle(tgtpos,sensorpos);[〜,jamang] = rangeangle(jampos,sensorpos);模拟脉冲在目标方向上的传播脉冲波形=();[脉冲,txstatus] =发射机(脉冲);脉冲=散热器(脉冲,tgtang);脉冲= tgtchannel(脉冲,sensorpos,tgtpos,sensorvel,tgtvel);在传感器%收集目标的回报脉冲=目标(脉冲);tsig(:,:,m)=收集器(脉冲,tgtang);%在传感器处收集干扰信号jamsig =干扰机();jamsig = jammerchannel (jamsig jampos、sensorpos jamvel, sensorvel);jsig (:,:, m) =收集器(jamsig jamang);在传感器处收集杂波信号学会(:,:,m) =杂乱();%接收到收集到的信号tjcsig(:,:,m)=接收器(tsig(:,:,m)+jsig(:,:,m)+csig(:,:,m),...~(txstatus>0);%目标+干扰杂波+tcsig(:,:,米)=接收机(tsig (:,:, m) +学会(:,:,米),...~(txstatus>0);%目标+杂波TSIG(:,:,M)=接收机(TSIG(:,:,米),...~(txstatus>0);仅%目标回波结束
真目标距离,角度和多普勒
目标方位角为45度,仰角约为-35.27度。
tgtLocation = global2localcoord(tgtpos,“rs”,传感器位置);tgtAzAngle=tgt位置(1)
tgtAzAngle = 44.9981
tgtElAngle = tgtLocation(2)
tgtElAngle = -35.2651
目标射程1732米。
tgtRng = tgtLocation (3)
tgtRng = 1.7320 e + 03
目标多普勒标准化频率约为0.21。
径向速度(tgtpos, tgtmov . velocity,...sensorpos,sensormotion.Velocity);tgtDp=2*speed2dop(sp,lambda);%双程多普勒tgtDp /脉冲重复频率
ANS = 0.2116
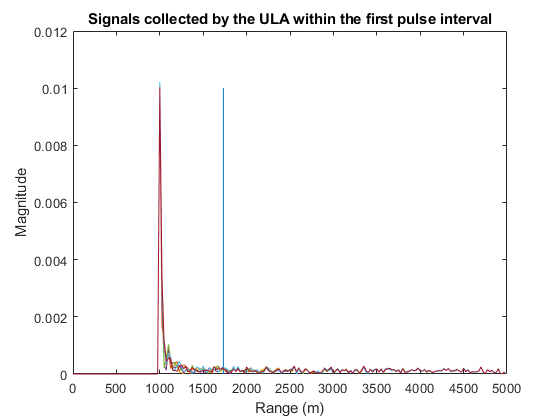
接收到的信号总数包含目标、杂波和干扰机的返回值。信号是一个三维的数据立方体(范围桶x元素数x脉冲数)。注意,杂乱的返回控制了总返回并掩盖了目标返回。在这个阶段,如果没有进一步的处理,我们无法检测到目标(蓝色竖线)。
ReceivePulse = tjcsig;情节([tgtRng tgtRng],[0 0.01],rngbin,ABS(ReceivePulse(:,:,1)));包含(的范围(m)),伊拉贝尔(“级”);标题(‘ULA在第一个脉冲间隔内收集的信号’)
现在,检查二维角度多普勒(或空时)域的返回。通常,响应是通过扫描给定仰角的所有范围和方位角生成的。因为我们知道目标的确切位置,所以我们可以计算出它相对于天线阵列的距离和仰角。
tgtCellIdx = val2ind(tgtRng,C /(2个* FS));快照= shiftdim(ReceivePulse(tgtCellIdx,:,:));%删除单暗淡angdopresp = phased.AngleDopplerResponse(“SensorArray”、齿龈...'工作频率'足球俱乐部,“PropagationSpeed”,c,...脉冲重复频率的脉冲重复频率,“ElevationAngle”,tgtElAngle);绘图仪响应(angdopreps,快照,“NormalizeDoppler”,真正);文本(tgtAzAngle,tgtDp / PRF,' +目标”)
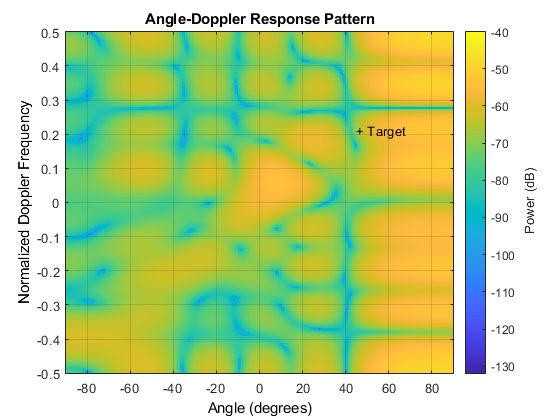
如果我们观察由杂波返回控制的角度多普勒响应,我们会发现杂波返回不仅占据了零多普勒,而且还占据了其他多普勒箱。杂波回波的多普勒也是角度的函数。杂波的返回在整个角度多普勒空间看起来像一条对角线。这样一条线通常被称为杂波脊.接收到的干扰信号是白噪声,它以一个特定的角度(大约60度)散布在整个多普勒频谱上。
用DPCA对消器抑制杂波
位移相位中心天线(DPCA)算法通常被认为是第一个STAP算法。该算法利用移位孔径对平台运动进行补偿,使杂波回波不随脉冲的变化而变化。因此,该算法可以通过简单地减去两个连续脉冲来消除杂波。
一个DPCA消除经常用于Ulas公寓,但需要特殊的平台运动的条件。平台必须沿着天线的阵列轴和以这样的速度的一个脉冲间隔期间,平台行进恰好一半的元件间距的移动。这里使用的系统设置,如前面部分描述,以满足这些条件。
假设N是ULA元素的个数。在第一脉冲期间从天线1到天线N-1接收到的杂波返回与在第二脉冲期间从天线2到天线N接收到的杂波返回相同。通过减去这两个子阵在两个脉冲间隔内接收到的脉冲,可以消除杂波。这种方法的成本是比原始阵列小一个单元的孔径。
现在,定义一个pca对消器。该算法可能需要搜索所有的角度和多普勒的组合来定位目标,但是对于这个例子来说,因为我们知道目标的确切位置,我们可以将处理器指向那个点。
rxmainlobedir = [0;0);stapdpca = phased.DPCACanceller (“SensorArray”、齿龈脉冲重复频率的脉冲重复频率,...“PropagationSpeed”,c,'工作频率'足球俱乐部,...“方向”,rxmainlobedir,“多普勒”tgtDp,...'WeightsOutputPort',真正)
stapdpca = phased.DPCACanceller与属性:SensorArray:[1x1的phased.ULA] PropagationSpeed:299792458 OperatingFrequency:1.0000e + 10 PRFSource: '属性' PRF:2.9979e + 04 DirectionSource: '属性' 方向:[2×1双] NumPhaseShifterBits:0DopplerSource: '财产' 多普勒:6.3429e + 03 WeightsOutputPort:真PreDopplerOutput:假
首先,将DPCA消除器应用于目标回波和杂波回波。
ReceivePulse = tcsig;[y, w] = stapdpca (ReceivePulse tgtCellIdx);
处理后的数据将空间和脉冲间的所有信息合并为一个脉冲。接下来,在时域中检查处理后的信号。
情节([tgtRng tgtRng],[0 1.2E-5],rngbin,ABS(Y));包含(的范围(m)),伊拉贝尔(“级”);标题(“DPCA取消输出(没有干扰机)”)
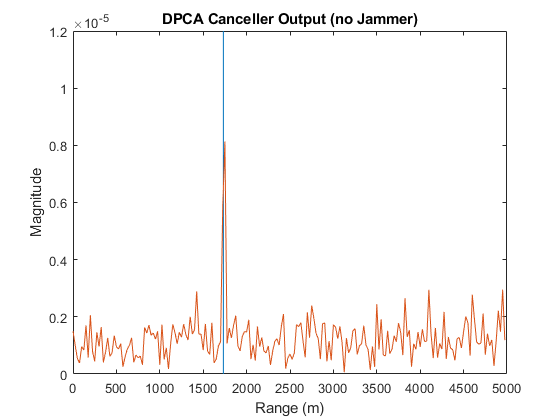
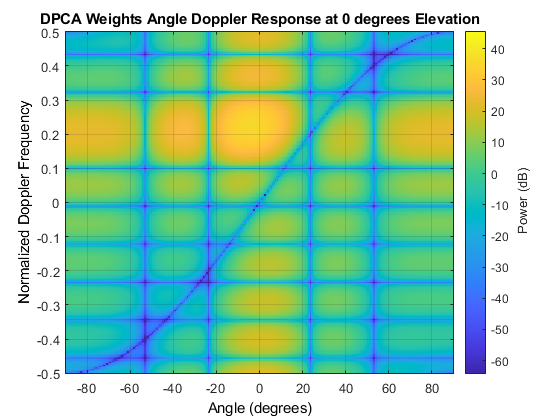
信号现在可以清楚地从噪音中分辨出来,杂波也被过滤掉了。从下面的DPCA处理器权值的角度多普勒响应可以看出,权值在杂波脊上产生一个深空。
angdopresp.ElevationAngle = 0;绘图仪响应(angdopresp,w,“NormalizeDoppler”,正确);标题(“0度仰角下的DPCA加权角多普勒响应”)
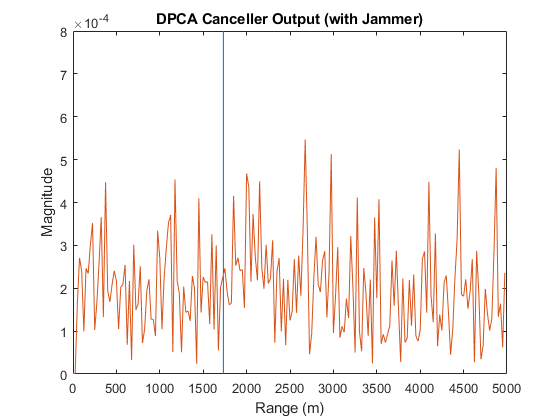
虽然DPCA得到的结果很好,但是雷达平台在使用这种技术时必须满足非常严格的运动要求。此外,DPCA技术也不能抑制干扰机的干扰。
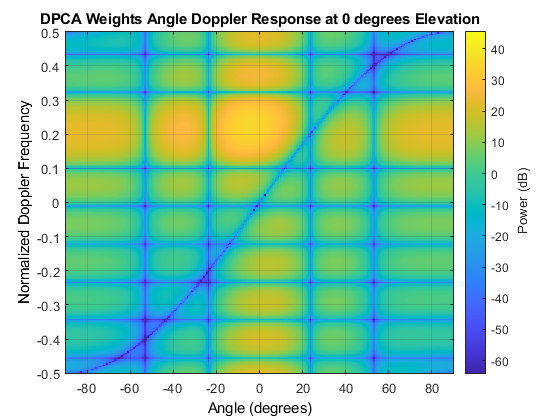
将DPCA处理应用于总信号,得到如下图所示的结果。我们可以看到DPCA不能从信号中过滤干扰机。所得到的角度多普勒模式的权值与之前相同。因此,处理器不能适应新增加的干扰机干扰。
ReceivePulse = tjcsig;[y, w] = stapdpca (ReceivePulse tgtCellIdx);情节([tgtRng tgtRng],[0 8]的军医,rngbin, abs (y));包含(的范围(m)),伊拉贝尔(“级”);标题(“DPCA取消输出(带干扰机)”)
绘图仪响应(angdopresp,w,“NormalizeDoppler”,正确);标题(“0度仰角下的DPCA加权角多普勒响应”)
杂波和干扰抑制与一个SMI波束形成
为了同时抑制杂波和干扰,我们需要一个更复杂的算法。当干扰为高斯分布时,最佳接收机权值由[1]给出
哪里k是一个标量的因素,R是干扰信号的空时协方差矩阵,并且年代是期望的时空导向向量。的准确资料R通常是不可用的,因此我们将使用样本矩阵反演(SMI)算法。该算法估计R从训练细胞样本,然后使用它在上述方程。
现在,定义一个SMI波束形成器,并将其应用到信号。除了在神龙公司所需要的信息,SMI的波束形成需要知道保卫细胞的数量和训练细胞的数量。该算法使用训练细胞的样本来估计干扰。因此,我们不应该是接近的估计靶细胞的细胞,因为它们可能包含一些目标信息,即我们应该定义保卫细胞。保卫细胞的数量必须是在前面同样和目标小区后面被分割为偶数。培养细胞的数量也必须是偶数并且在前面和后面的目标平分。通常情况下,更大的训练细胞的数量,更好的干扰估计。
tgtAngle = [tgtAzAngle;tgtElAngle];stapsmi = phased.STAPSMIBeamformer (“SensorArray”,乌拉,脉冲重复频率的脉冲重复频率,...“PropagationSpeed”c'工作频率'足球俱乐部,...“方向”,tgtAngle,“多普勒”tgtDp,...'WeightsOutputPort',真的,...“NumGuardCells”4'NumTrainingCells',100)
stapsmi =分阶段。具有属性的STAPSMIBeamformer: SensorArray: [1x1相控阵]。更新频率:299792458运行频率:1 0000e+10 PRFSource: 'Property' PRF: 2.9979e+04 DirectionSource: 'Property' Direction: [2x1双]NumPhaseShifterBits: 0 DopplerSource: 'Property'多普勒:6.3429e+03 NumGuardCells: 4 NumTrainingCells: 100 WeightsOutputPort: true
[Y,W] = stapsmi(ReceivePulse,tgtCellIdx);情节([tgtRng tgtRng], [0 2 e-6], rngbin, abs (y));包含(的范围(m)),伊拉贝尔(“级”);标题(“SMI波束形成器输出(带干扰机)”)
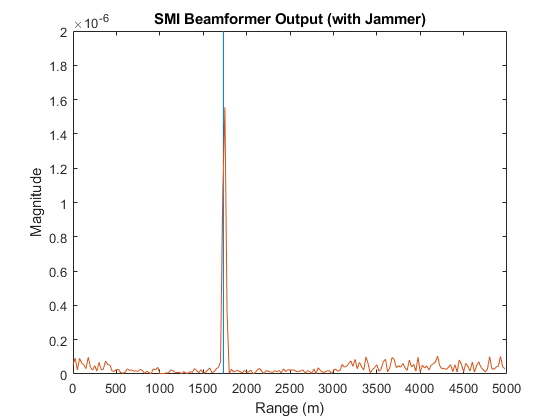
绘图仪响应(angdopresp,w,“NormalizeDoppler”,正确);标题(“SMI加权0度仰角多普勒响应”)
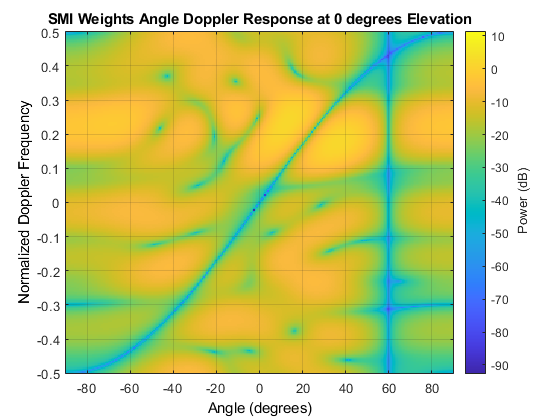
结果表明,一个SMI波束形成器可以从杂波和干扰信号两者区分信号。的权重SMI示出了角度多普勒图案沿着干扰方向的深空。
SMI提供了最大的自由度,并因此,所有STAP算法中的最大增益。它经常被用作用于比较不同的算法STAP的基线。
用ADPCA对消器降低计算量
虽然SMI是最优的STAP算法,但它有几个固有的缺点,包括计算成本高,因为它使用每个单元的全维数据。更重要的是,SMI需要跨多个脉冲的稳定环境。这种环境在实际应用中并不常见。因此,提出了许多降维STAP算法。
自适应DPCA (ADPCA)消除器以与DPCA相同的方式滤除杂波,但它也具有抑制干扰的能力,因为它使用两个连续的脉冲估计干扰协方差矩阵。由于只涉及两个脉冲,计算量大大减少。此外,由于该算法对干扰的适应性较强,也能承受一定的运动干扰。
现在,定义一个ADPCA消除器,然后将其应用于接收信号。
stapadpca = phased.ADPCACanceller (“SensorArray”,乌拉,脉冲重复频率的脉冲重复频率,...“PropagationSpeed”c'工作频率'足球俱乐部,...“方向”,rxmainlobedir公司,“多普勒”tgtDp,...'WeightsOutputPort',真的,...“NumGuardCells”4'NumTrainingCells',100)
stapadpca = phased.ADPCACanceller与属性:SensorArray:[1x1的phased.ULA] PropagationSpeed:299792458 OperatingFrequency:1.0000e + 10 PRFSource: '属性' PRF:2.9979e + 04 DirectionSource: '属性' 方向:[2×1双] NumPhaseShifterBits:0DopplerSource: '财产' 多普勒:6.3429e + 03 NumGuardCells:4个NumTrainingCells:100 WeightsOutputPort:真PreDopplerOutput:假
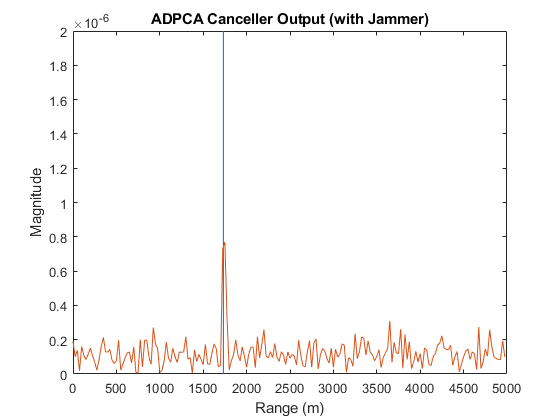
[y, w] = stapadpca (ReceivePulse tgtCellIdx);情节([tgtRng tgtRng], [0 2 e-6], rngbin, abs (y));包含(的范围(m)),伊拉贝尔(“级”);标题(“ADPCA取消输出(与干扰机)”)
绘图仪响应(angdopresp,w,“NormalizeDoppler”,正确);标题(“0度仰角下的ADPCA加权角多普勒响应”)
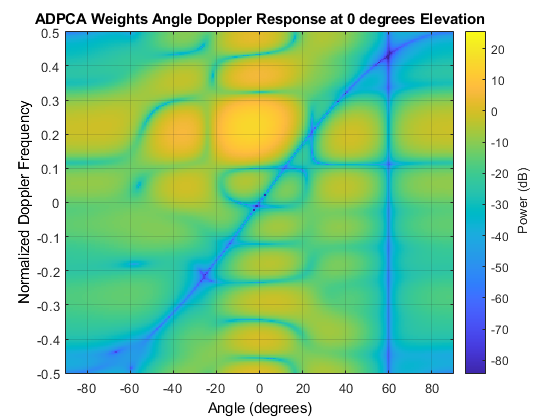
时域图显示信号已成功恢复。ADPCA权重的角度多普勒响应与SMI权重的角度多普勒响应相似。
摘要
本实施例中提出了一个简单介绍空时自适应处理和示出了如何使用不同的算法STAP,即SMI,DPCA和ADPCA,以便在所接收的脉冲抑制杂波和干扰的干扰。
参考
[1] J.R.Guerci,雷达空时自适应处理,艺达大厦,2003
也可以从以下列表中选择网站: